
Avant la simulation, la validation de nouveaux systèmes (véhicules complets, loi de commande ADAS, phares, etc.) n’était réalisée que par des tests physiques, ce qui signifie que plusieurs versions de prototypes étaient déployées sur une piste d’essai afin d’assurer que le comportement était celui attendu.
L’objectif de ces tests physiques est d’améliorer la qualité et les performances des systèmes en réalisant diverses situations de conduite dans des conditions spécifiques. Pour ce faire, chaque équipe d’un projet souhaite optimiser les coûts et minimiser les délais de la phase de développement et essaye d’accélérer les tests et la validation, tout en garantissant la sécurité des employés et des utilisateurs.
D’autre part, la simulation a apporté de nouveaux défis et possibilités depuis les années 90. La simulation aide les constructeurs automobiles, les équipementiers, les centres de recherche et autres à développer et accélérer les systèmes et modèles numérique pour la mobilité en diversifiant les situations de conduite possibles (plus d’acteurs, différentes routes, etc.). Pour augmenter la vitesse des campagnes de test et de validation, mais aussi la sécurité des employés, la simulation permet l’utilisation de simulateurs de conduite. Elle permet également de créer des prototypes à chaque étape de la conception (de MiL à ViL) afin d’améliorer les performances et la qualité des systèmes, notamment en faisant de meilleurs choix technologiques et/ou ergonomiques plus tôt dans le projet.
Depuis plus de 30 ans, les équipes d’AVSimulation développe un outil de simulation pour répondre à ces problématiques. Grâce à SCANeR, vous pouvez répliquer des jumeaux numériques de vos SUTs et bénéficier d’un environnement riche et représentatif pour les valider de manière itérative en boucle ouverte et/ou fermée dans de nombreux domaines de l’industrie automobile.
Par exemple, concernant le développement de nouveau système de phares, les cycles de développement n’ont plus à être basés sur les saisons, car la simulation permet aux utilisateurs de contrôler l’environnement. Si vous devez conduire la nuit (ou sous la pluie), vous n’avez plus besoin d’attendre des conditions météorologiques spécifiques ; les équipes éclairage peuvent tester, valider et régler leurs systèmes pendant la journée ! L’efficacité, l’éblouissement ou l’inconfort peuvent être mesurés au sein de la simulation (et/ou dans un simulateur de conduite). Cela permet également de tester des situations d’urgence, ou complexes, en évitant tout risque et mesurer les réactions du testeur sur une route ouverte.
Enfin, le développement de prototypes, qui représente un investissement élevé (par rapport à la faible quantité produite) dans un projet, peut être réduit grâce à la simulation. Dans le cas d’un projet éclairage, nous mesurons une réduction de 3 à 5 maquettes grâce au pack Headlight de SCANeR , et seule la dernière est utilisée pour valider les outils et les performances. Cela affecte directement le ROI d’un projet, avec une réduction des coûts de 600 mille euros jusqu’à 1 million d’euros.
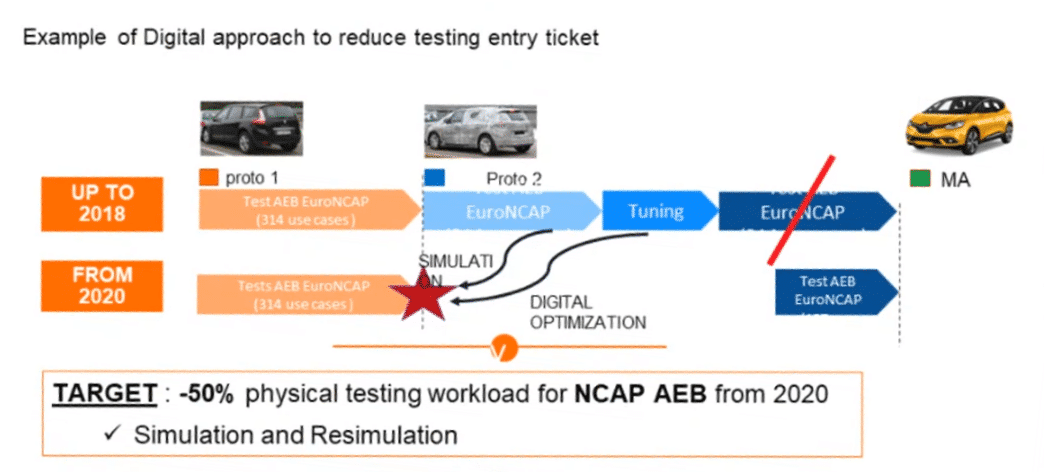
Ceci est également vrai pour les autres systèmes composant un véhicule. Par exemple, les tests ADAS réalisés lors d’une campagne NCAP peuvent également être optimisés. L’image ci-dessous montre l’expérience de Renault suite à l’utilisation de SCANeR et de son pack NCAP & Regulation. Lorsque la simulation est utilisée, la détection de problèmes intermédiaires et le réglage du système sont effectués avant le déploiement d’un prototype, ce qui peut conduire à un premier test sur piste concluant. (Sachant que la campagne EuroNCAP complète seule coûte environ 350 k€).
Les réglementations en matière de tests ont également changé au cours des dernières années. Les scénarios SOTIF, qui exigent des « scénarios inconnus », en sont un bon exemple. Une façon de découvrir ces « scénarios inconnus » peut consister à exécuter des millions de scénarios en parallèle et à modifier les valeurs des différents paramètres du test. Le pack Massive Simulation de SCANeR permet de déployer une architecture cloud pour SCANeR. L’architecture cloud permet d’utiliser une version en ligne de commande de SCANeR, ce qui permet une utilisation avec une configuration matérielle minimale et également une exécution rapide des scénarios SCANeR en parallèle afin de tester une large gamme de valeurs pour chaque paramètre.
De plus, il a été mathématiquement prouvé [cf. https://www.rand.org/content/dam/rand/pubs/research_reports/RR1400/RR1478/RAND_RR1478.pdf] que pour un niveau d’autonomie élevé, il est impossible de réaliser des tests sur pistes pour chaque situation. Une façon de couvrir le maximum de situations est de laisser le système conduire des millions, voire des milliards de kilomètres, ce qui est réalisable grâce à une plateforme de simulation massive.
Néanmoins, la simulation ne sera jamais aussi vraie que les tests réels, quelle que soit la richesse d’un environnement numérique. Nous aurons toujours besoin d’un test physique réel d’un système complet, ou partiel, en raison des besoins qu’impliquent la sécurité et la fiabilité.
Simulation et tests réels sont complémentaires !
Nous devons garder à l’esprit que la simulation offre différents niveaux de description : fonctionnelles ou physiques. Cela signifie que la simulation fait ce que nous attendons d’elle ; les calculs physiques ou optiques sont basés sur la description des matériaux.
Mais certaines propriétés physiques, certaines descriptions de matériaux et/ou certaines situations complexes de la réalité ne peuvent être simulées en totalité, ou ne peuvent être mises en œuvre en raison du caractère aléatoire ou de la complexité de la représentation (par exemple, les effets multiples d’une tempête de neige sur l’adhérence, la visibilité, l’accumulation d’eau, etc.)
Au-delà de la phase de test d’un produit, la simulation doit faire l’objet de tests physiques afin de corréler la véracité des modèles mis en œuvre. En effet, la seule façon de numériser une loi physique est de confronter les résultats de la simulation à des tests réels sur le terrain pour s’assurer que l’environnement modélisé est correct et fiable.
Un dernier sujet que nous n’avons pas encore évoqué est celui des nouveaux défis que posent les véhicules autonomes. Au cours des prochaines années, l’industrie automobile devra assurer la continuité numérique entre les logiciels, les modèles et les véhicules déployés sur la route. Les projets Vehicle-In-the-Loop menés par AVSimulation depuis quelques années maintenant sont des exemples de la manière dont l’équipe d’AVSimulation font face à ces nouveaux défis.
Par exemple, AVSimulation et l’UTAC ont déployé une voiture complète, identique à sa jumelle numérique dans SCANeR. Celle-ci a été utilisée pour tester et valider une loi de commande ADAS ; l’idée était de leurrer les capteurs de la voiture avec des obstacles virtuels (piétons, infrastructure routière, etc.). La voiture sur piste réagit par rapport à ce que les capteurs ont détecté virtuellement. Il permet de tester des cas d’utilisation plus complexes avec plus d’acteurs, un temps de conduite plus long, etc., et d’assurer la répétabilité et la reproductibilité de ces situations complexes.
|
Ces projets illustrent bien la complémentarité entre la simulation et les essais sur piste. La simulation est un nouvel outil qui permet d’accélérer les campagnes d’essais et offre plus de flexibilité pendant la phase de développement et de mise au point. Les résultats sur le projet sont une réduction des coûts et la capacité de simuler des situations connues et inconnues. Cependant, nous devons garder à l’esprit que sans essais sur piste, la simulation ne peut être cohérente, et que l’industrie exigera toujours des essais réels (soit pour tester et valider leurs systèmes, soit pour valider une modélisation d’une loi physique). |
Écrit par Ludovic Pfeffer.
Vous souhaitez avoir plus d’informations et être contacté par l’un de nos commerciaux, contactez-nous.