
Driver in the Loop
Le concept du simulateur de conduite est apparu dans les années 1930 afin d’effectuer des recherches sur la sécurité routière. La représentation présentée ci-contre par DeSilva en 1936 est déjà proche de certains simulateurs de nos jours.
L’idée était déjà de mettre le conducteur en position de conduite, en reproduisant les stimuli utilisés par le cerveau pour effectuer les mouvements de conduite. Les simulateurs d’aujourd’hui sont basés sur le même concept.
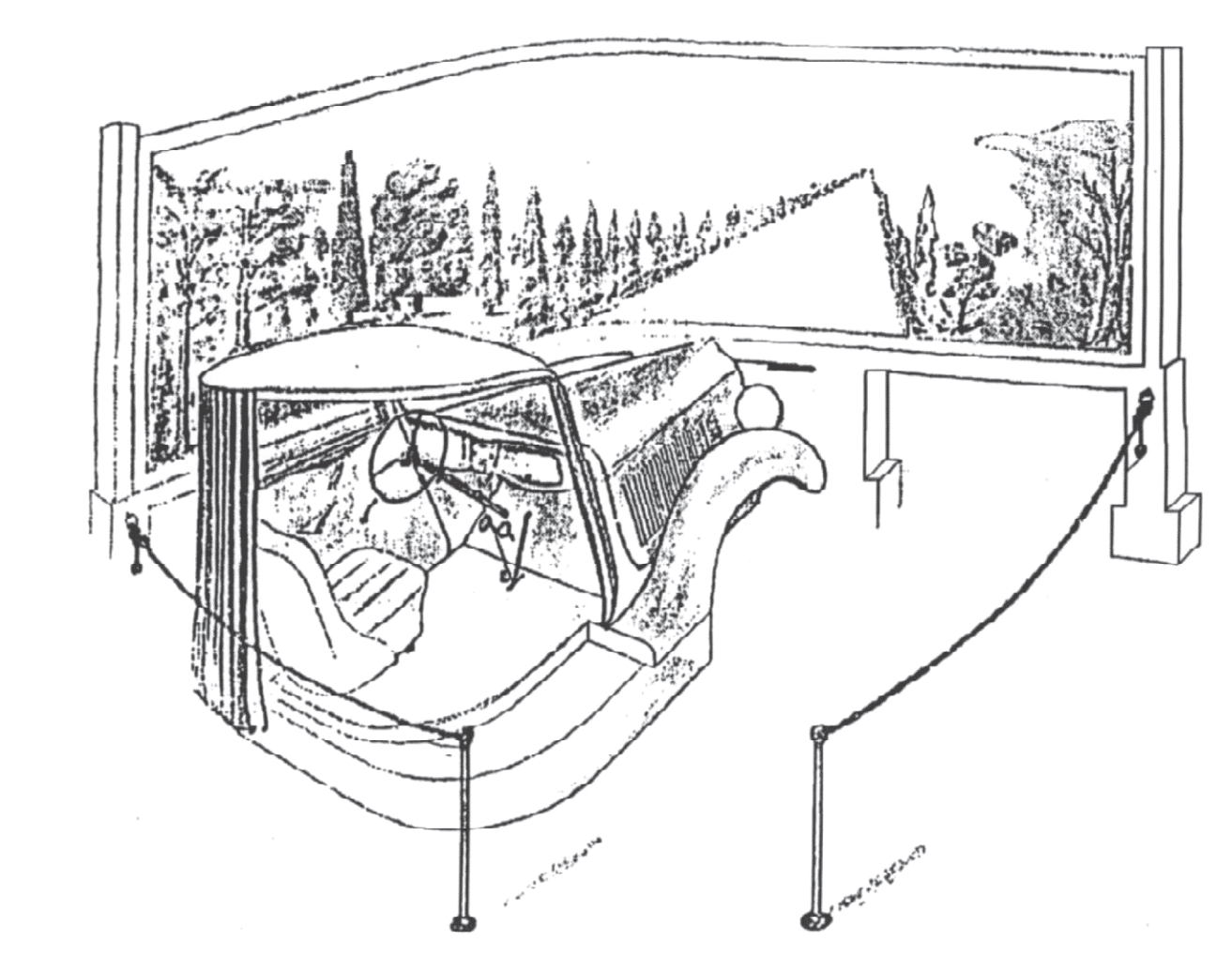
DeSilva, 1936
Ce type de simulateur,appelé « driver-in-the-loop » (conducteur dans la boucle, DiL)fournit au conducteur des signaux sensoriels qui lui permettent d’accomplir les mouvements habituels de conduite. Les actions du conducteur sont utilisées comme entrées dans les capteurs pour calculer la dynamique du véhicule.
Ces données d’entrée et de sortie sont produites avec un niveau de fidélité progressif par des simulateurs de toutes tailles.
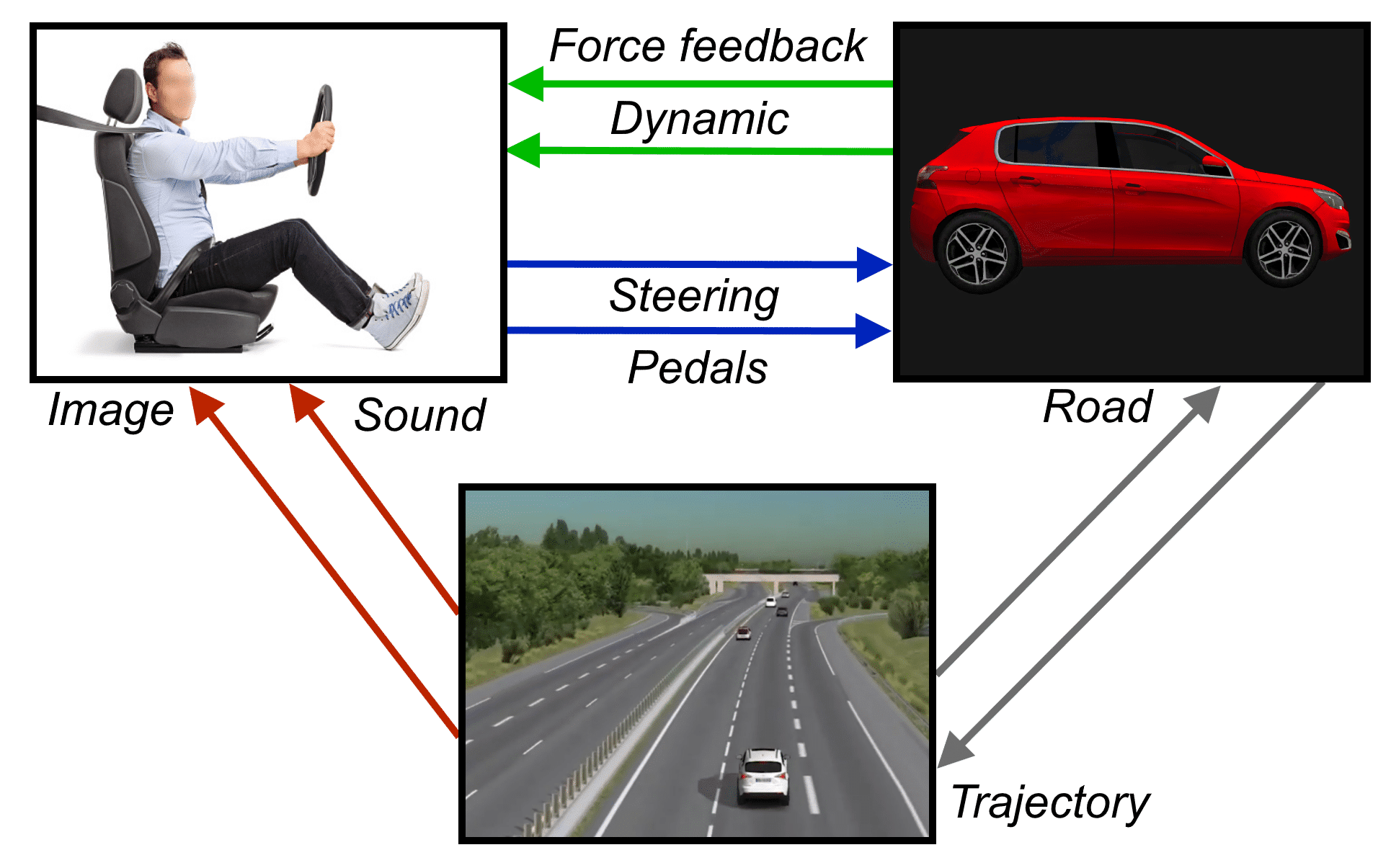
Diagramme d’un “driver in the loop”.
Dans un simulateur « driver in the loop », l’élément d’analyse principal n’est pas forcément le conducteur. Il peut également être utilisé pour tester du matériel ou des logiciels dans des situations réalistes bien qu’une personne physique se trouve derrière le volant.
Comment reconnaitre un bon simulateur ?
Dans la grande variété de solutions de simulation disponibles, qu’est-ce qui fait un bon simulateur DiL, et comment choisir le meilleur pour votre projet ?
Si nous faisons le parallèle avec les jeux vidéo, un joueur de course automobile se concentrera sur plusieurs éléments de son équipement :
- L’écran : plus il est large, meilleure sera l’immersion.
- Le dispositif d’acquisition : il s’agit généralement d’une manette de jeu au volant.
- Le siège : un siège baquet qui donne l’impression d’être dans une vraie voiture de course.
- Le logiciel : de meilleurs graphismes pour plus d’immersion et se rapprocher du réel.
Alors que le jeu vidéo se concentre sur l’impression de réalisme et de sensations fortes, la simulation de conduite pour le développement de véhicules se soucie davantage de l’exactitude et la pertinence des rendus. Dans ce cas, chaque composant est calibré.
L’affichage
Un écran plus large augmente la perception de la vitesse, grâce à la présence d’objets extérieurs à la route dans la vision périphérique du conducteur. Mais l’écran doit aussi garantir la lisibilité et le confort pendant la simulation.
En conduisant, le point d’attention du conducteur peut aller loin devant lui. Il doit être capable de distinguer les panneaux de signalisation, les objets et les autres usagers de la route malgré leur taille sur l’écran. Dans la simulation de conduite, certains marquages au sol sont très petits à l’écran s’ils sont éloignés. De même à grande vitesse – sur une autoroute par exemple – les panneaux de signalisation fixes situés sur le bord de la route sont lisibles uniquement si le taux de rafraîchissement de l’écran est suffisamment élevé. La résolution angulaire et le taux de rafraîchissement de l’écran sont donc essentiels pour la lisibilité.
Quant au mal des transports, il affecte chacun de manière différente. Les moyens de le minimiser sont toujours les mêmes. La cohérence entre les signaux envoyés au conducteur et l’environnement réel, sont des éléments clés. En plus des précisions techniques de l’écran, la calibration est importante afin d’avoir une meilleure exploitation des performances ainsi qu’une précision dans la restitution du monde virtuel dans le réel.
| Perception de la vitesse | Lisibilité | Confort de simulation |
| Résolution Détails de la scène Meilleur rendu en 3D Vue latérale |
Résolution et précision Contraste Fréquence Réduction du maculage (smear reduction) |
Champ de vision (Immersion) Fréquence Latence Homogénéité (luminosité et couleur) Alignement à la route Echelle 1:1 |
Critères d’affichage pour la simulation
Les technologies disponibles pour atteindre les spécifications fixées sont diverses et le choix dépend également des contraintes liées aux locaux. Par exemple, l’espace disponible, les dimensions ou l’alimentation électrique, le budget disponible et le cas d’utilisation principal.
Exemples de technologies d’affichage :

Moniteur

Casque VR

CAVE

Projection

Mur LED
Le cockpit
Les dispositifs d’acquisition jouent un rôle important dans l’immersion du conducteur. Alors qu’un clavier d’ordinateur pourrait être utilisé, les simulateurs DiL nécessitent au moins un volant et des pédales de contrôle.
Côté volant de direction, un retour de force plus puissant et plus réactif permettra une restitution plus réaliste de la dynamique du véhicule et des effets de la route. Il permet également d’avoir un volant de taille réelle, qui peut provenir directement d’un véhicule.
Les pédales ont également un retour d’information passif ou actif. Le feedback passif permet d’obtenir une sensation réaliste et peut offrir la possibilité d’ajuster mécaniquement la sensation de résistance. Seul le feedback actif des pédales peut rendre des effets spéciaux provenant de la dynamique du véhicule et de la route, tels que des vibrations dues à la rugosité de la surface, de l’action d’un ABS.
Enfin, les éléments venant compléter le cockpit vont du simple bureau avec compteur de vitesse à l’écran au cockpit complet d’une voiture réelle avec instruments de conduite actifs. L’espace disponible et le niveau d’immersion souhaité déterminent le choix du cockpit. Si la polyvalence est un critère, les éléments modulables seront privilégiés. Par exemple, en utilisant un écran au lieu des compteurs.
Exemples de composants de cockpits :
| Volant | Pédales | Équipement |
| Volant de jeu Volant avec retour de force performant |
Passives Passives ajustables Actives |
Bureau Imitation de planche de bord Planche de bord réelle Moitié avant d’une voiture Véhicule entier |
Un cockpit plus complet et à taille réelle donne l’impression au conducteur qu’il se trouve à l’intérieur d’une vraie voiture. Cependant, l’absence de mouvement trahit l’artifice et procure de l’inconfort. Il est essentiel que le réalisme du cockpit soit homogène avec le niveau de restitution de l’affichage, et du système de mouvement.
Le système de mouvement
Un simulateur de conduite sans système de mouvement est dit « statique ». Le système de mouvement rend un simulateur « dynamique » pour améliorer l’immersion et le confort de la simulation.
Les mouvements sont détectés par le corps humain par l’intermédiaire de l’oreille interne, ainsi qu’un contact sur le reste du corps. Le défi consiste à fournir au conducteur l’accélération linéaire, la vitesse de rotation et les effets spéciaux qu’il attend en conduisant – en fonction de ses actions, de la dynamique du véhicule et de l’environnement -. La cohérence entre ce que le conducteur voit et ce qu’il ressent lui permet d’oublier qu’il est dans un simulateur et de se comporter plus fidèlement, comme s’il était sur la route.
Sans restitution de mouvement pendant la conduite, on a l’impression d’être sur un « tapis volant ». Aucun événement de la simulation de conduite ne semble avoir un impact réel sur le conducteur. Pour éviter cela, les premiers mouvements qu’un système de mouvement reproduit sont de petits effets, comme les vibrations de la route ou le changement de vitesse. Ces derniers se concentrent sur les zones de contact comme le volant, les pédales et le siège. Un retour de force actif est utilisé pour les deux premiers éléments. Concernant le siège, des actionneurs à vibration ou à piston peuvent être utilisés. À ce stade, il n’y a pas encore de véritable « degré de liberté » (DdL).
Les trois premiers DdL permettent de signaler des événements de plus grande amplitude – lorsque le conducteur commence à freiner, à accélérer, à tourner ou lorsqu’il rencontre un obstacle sur la route -. Cela renforce le réalisme de la conduite, car le conducteur sent désormais quand l’événement se produit. Le moment de sa réaction peut être calibré en fonction de ces signaux.
Les systèmes 6 DdL, 9 DdL ou plus permettent de donner des signaux d’amplitude plus grands et de les mesurer. Le conducteur ressent la dynamique du véhicule. Il peut modérer ses actions en fonction de la force des effets reproduits. Par exemple, la vitesse dans un virage, ou la force de freinage.
Plages de degrés de liberté :

Effets spéciaux
6 DdL et plus
6 DdL et plus
Reproduire des mouvements de plus grande amplitude, comme la force centrifuge (latérale) ou les poussées d’accélération et de freinage (longitudinale), implique un matériel de plus en plus lourd. Les mouvements eux-mêmes nécessitent une plus grande distance de déplacement. Au-delà de cela, c’est le conducteur qui décide du prochain mouvement. À tout moment, le simulateur doit être prêt à réagir à une variété d’actions que le conducteur pourrait choisir.
Plus la distance de déplacement disponible sur chaque axe est grande, meilleure sera la restitution. Afin d’optimiser l’exploitation de toute distance de déplacement disponible, l’anticipation est essentielle. Reproduire à tout moment des mouvements à l’échelle 1:1 n’est pas possible, car les limites mécaniques finissent pas être atteintes. L’équilibre entre la précision immédiate de la restitution et la continuité de l’immersion est le rôle du logiciel de « motion cueing ».
Le logiciel
Le logiciel de simulation est chargé de générer tous les signaux, de gérer le monde virtuel et de lire les entrées du conducteur. Il ferme la boucle en se substituant à tout ce qui n’existe pas dans le simulateur physique.
Tout ce que l’utilisateur voit et ressent est le résultat de modèles précis. La dynamique du véhicule garantit un comportement réaliste du véhicule suite aux commandes du conducteur. Le rendu 3D doit être suffisamment réaliste pour permettre l’immersion. Les acteurs environnants, tels que les piétons et la circulation, doivent se comporter de manière cohérente et naturelle.

Vue supervision de SCANeR studio
Dans le cas de SCANeR studio, le logiciel de simulation de conduite est également l’endroit où l’expérimentation est conçue, où les modèles sont configurés et où les indicateurs sont préparés pour une analyse en fin de simulation. Les fonctionnalités s’étendent à l’ensemble du cycle de développement et de test, permettant la collaboration entre équipes et compétences sur les mêmes modèles.

Quelques packs SCANeR studio : “the what”
Enfin, le logiciel de simulation de conduite permet l’exploitation du matériel du simulateur. Il doit être ouvert, permettant la connexion et la configuration de la plus large gamme de matériel possible. SCANeR studio intègre également les outils nécessaires à la calibration, qui, comme vu précédemment, est essentielle pour une exploitation optimale. Ceci est vrai pour le DiL, comme pour les autres plateformes utilisées pour la simulation automobile (Desktop, HiL, Massive Simulation, …). Le tout dans le même logiciel.

Quelques packs SCANeR studio : “the how”
En résumé
Plus grand, plus puissant et plus cher ne signifie pas toujours plus performant. Dès le début, il est important de faire un choix éclairé de solutions afin d’obtenir un résultat optimisé pour un cas d’utilisation ou pour un usage polyvalent.
La solution d’AVSimulation commence par la définition du besoin jusqu’au fonctionnement de votre simulateur DiL. Profitez de décennies d’expérience dans la mise en service et l’exploitation de simulateurs de conduite.

L’équipe d’AVSimulation se tient à votre disposition concernant vos besoins en DiL.
Pour plus d’informations, n’hésitez pas à vous rendre sur nos catalogues.
Écrit par Guillaume Adam.