The Interview: Modèle de dynamique de véhicule CALLAS
Mai 13, 2022
Peux-tu te présenter en quelques mots.
Rémi Figueredo, je suis ingénieur en R&D chez AVSimulation depuis 3 ans, et mon domaine d’expertise est la Dynamique des Véhicules. Au sein de la direction technique, je participe au développement du logiciel SCANeR et à son intégration dans les différents simulateurs et/ou bancs VIL et HIL. J’interviens également dans les études de dynamique du véhicule pour le client en prestation, assistance et support.
Peux-tu nous expliquer ce que l’on appelle la dynamique du véhicule ?
La dynamique du véhicule est un domaine industriel et scientifique qui décrit comment un véhicule réagit aux commandes du conducteur et à l’environnement. Les réactions du véhicule comprennent le mouvement du châssis, et sont influencées par les forces des pneus. Ces dernières exercent un effort sur la suspension qui agit sur le châssis par une cinématique complexe.
Il s’agit d’un modèle mathématique, basé sur les concepts et les théories de la mécanique générale. Il est implémenté dans un logiciel qui simule le mouvement du véhicule. Le modèle comprend des composants pour tous les aspects d’un véhicule qui influencent son comportement : transmission, freinage, suspension, direction, répartition des masses, aérodynamique et pneus.
C’est un outil technique d’ingénieur qui permet de déterminer, au niveau de l’avant-projet, l’architecture du véhicule et/ou de valider les systèmes/sous-systèmes du véhicule (calcul corrélé). Finalement, la dynamique du véhicule peut être utilisé comme un substitut, du châssis et groupe motopropulseur réels, pour simuler les interactions complexes entre capteurs et/ou actionneurs avec son environnement, dans un véhicule moderne.
Si je comprends bien, il y a plusieurs types de modélisation. Qu’est ce qui caractérise CALLAS ?
En effet, nous définissons d’abord les niveaux de modélisation décrivant la complexité du modèle CALLAS.
Modélisation générale : le type (véhicule à roues, à chenilles ou mix des deux), le nombre d’essieux, la géométrie générale qui est symétrique ou non, la transmission mécanique, hydrostatique ou sans transmission (remorque), le moteur thermique, électrique ou encore hybride.
Modélisation par composant et/ou sous-système : lois de direction/suspension/etc. qui sont symétriques ou non. La modélisation de chaque composant peut être simplifiée ou détaillée.
Modélisation avec d’autres options d’aspect numérique : palpeur roue/sol volumique ou simple.
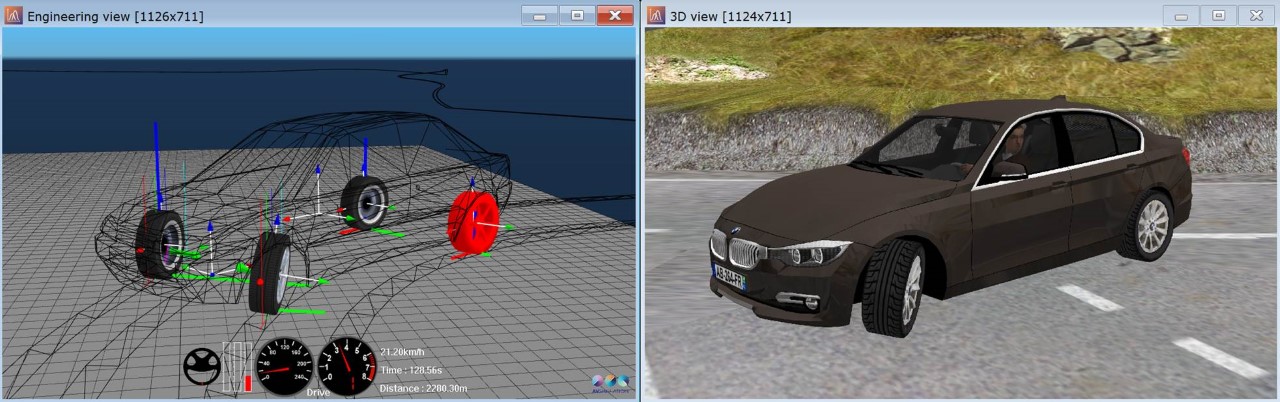
On dit que CALLAS est un modèle paramétrique. Hormis les dimensions générales du véhicule, les données d’entrée sont des caractéristiques fonctionnelles (courbes et/ou cartographies des lois de variation des sous-systèmes). Exemple : les courbes-caractéristiques fonctionnelles d’éléments de suspensions (efforts versus débattement-roue, variation cinématique versus débattement-roue, etc.) sont issues soit de mesures sur véhicule réel, ou issues de calculs de cinématique via des progiciels de simulation de systèmes multi-corps, avec un grand degré de complexité, tel que MSC Adams, Modelica ou encore CATIA.
CALLAS permet donc d’analyser le comportement dynamique des véhicules en choisissant judicieusement la complexité du modèle par rapport aux essais étudiés. Cette complexité se quantifie par le nombre de degrés de liberté (DDL), qui commence à partir de 16-17 DDL pour un véhicule conventionnel jusqu’à plus de 100 pour un camion-remorque détaillé.
Qu’est ce que CALLAS apporte au Pack Vehicle Dynamics ?
Rappelons que le Pack Véhicule Dynamique permet à l’utilisateur de créer et de valider un modèle dynamique complet de véhicule. Etant inclus dans le Pack Véhicule Dynamique, le modèle CALLAS s’adapte aux données d’entrée fournies par l’utilisateur (choix du niveau de modélisation en général, ou par composant), et donc apporte toujours une solution de création et d’analyse.
Le Pack Véhicule Dynamique propose également une bibliothèque de véhicules CALLAS de première qualité, livrés par défaut avec SCANeR. Ces véhicules sont près à l’emploi et l’utilisateur a la possibilité de les utiliser/tester en simulateur, ou comme base de travail pour une étude dynamique spécifique à leur besoin.
Quels sont les modèles de dynamique de véhicule CALLAS existants ?
Le logiciel SCANeR est fourni avec une bibliothèque de plus de 20 véhicules CALLAS de différentes catégories/gabarits : tels que des voitures (citadine, berline, familiale en traction et/ou propulsion), pick-up, 4×4, 2 véhicules électriques, une hybride, des camions, un bus, des remorques et 2 voitures de sport.
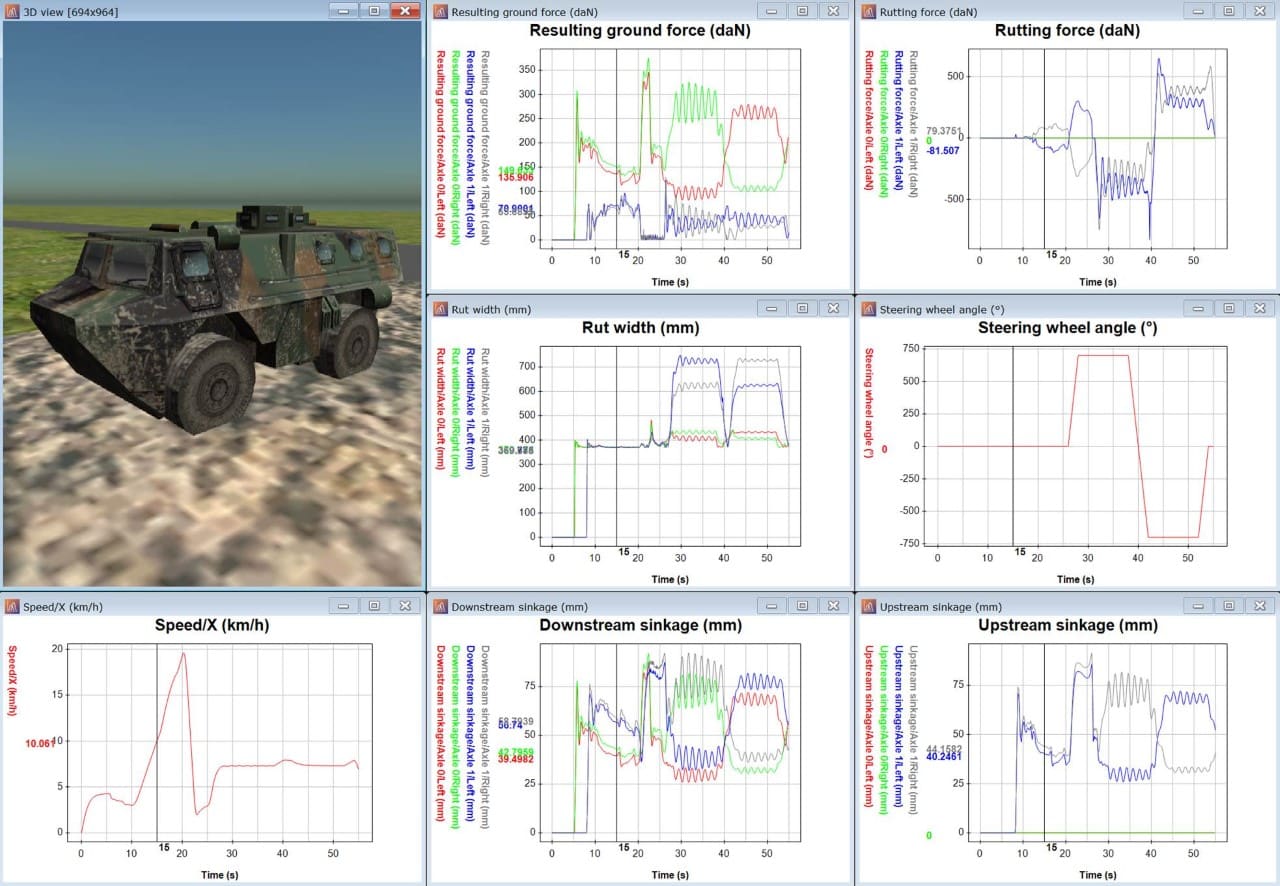
De plus, l’accès aux véhicules spéciaux tels que les véhicules à chenilles ou à roues équipés d’une tourelle est soumis à autorisation. Pour adapter le véhicule à l’application du client, un éditeur d’interface permet de modifier les caractéristiques et les attributs du véhicule. Cette fonction peut également être fournie en tant que service.
Quels sont, selon toi, les points qui font de CALLAS l’une des meilleures sinon LA meilleure dynamique de véhicule au monde ?
CALLAS s’adapte aux besoins des utilisateurs. La plupart d’entre eux peuvent utiliser les modèles de référence CALLAS fournis pour leurs simulations de conduite, avec peu à pas de modifications. Cependant, un ingénieur expert peut créer un véhicule à partir d’une feuille blanche et saisir toutes les mesures réelles et/ou les caractéristiques détaillées des différents métiers transversaux de la dynamique du véhicule (tests/mesures réels, calculs/conceptions cinématiques 3D à partir de logiciels multi-corps). Pour un comportement du véhicule hautement précis et validé.
CALLAS est un système rapide et ouvert. Il peut fonctionner de 2000Hz à 8000Hz sur du matériel PC standard avec une complexité similaire ou supérieure aux modèles concurrents (avec 17 DDL ou plus). Il peut être utilisé et supporté des applications de simulateur de conduite, les plateformes HIL/SIL/VIL en temps réel et les bancs d’essai, ainsi que pour le Cloud computing plus rapide que le temps réel. Les clients peuvent intégrer leurs propres sous-systèmes dans CALLAS en utilisant les outils de leur choix : Simulink, FMI, C/C++, etc.
Peux-tu nous donner un exemple de projet récent dans lequel CALLAS a été utilisé ?
CALLAS est utilisé sur certains des plus grands simulateurs de mouvements au monde, comme KEX, pour la R&D sur les véhicules de sport chez Alpine automotive, dans des applications militaires pour la R&D et la formation. CALLAS peut également être utilisé pour des études en tant que service par AVS, comme par exemples :
Etude sur la validation des configurations de camions avec semi-remorque (positionnement optimal des charges embarquées), basée sur des critères de conformité et de sécurité.
Modélisation d’un véhicule à partir de données d’acquisition réalisées sur un véhicule réel sur pistes d’essai.
As-tu des exemples de niveau de corrélation entre ce qui a été simulé avec CALLAS et mesuré physiquement ?
La corrélation dépend de la quantité de données disponibles sur le véhicule. Ces données peuvent être mesurées sur un banc d’essai ou sur une piste d’essai. Sur un modèle entièrement validé, le comportement peut être utilisé comme substitut du véhicule réel.
Revenons aux deux études discutées :
Concrètement un modèle CALLAS a été créé représentant le camion remorqué. Toutes les caractéristiques et mesures fournies par le client ont été prises en compte. Un retour d’expérience d’un test réel (mesure de l’angle maximal de renversement sur une plate forme inclinable) a été utilisé comme référence. Ainsi, nous avons affiné le modèle pour obtenir les mêmes résultats sur une simulation de la plate forme inclinable. Cette étude complémentaire nous permet d’être plus objectifs quant aux résultats attendus des autres simulations de conduite.
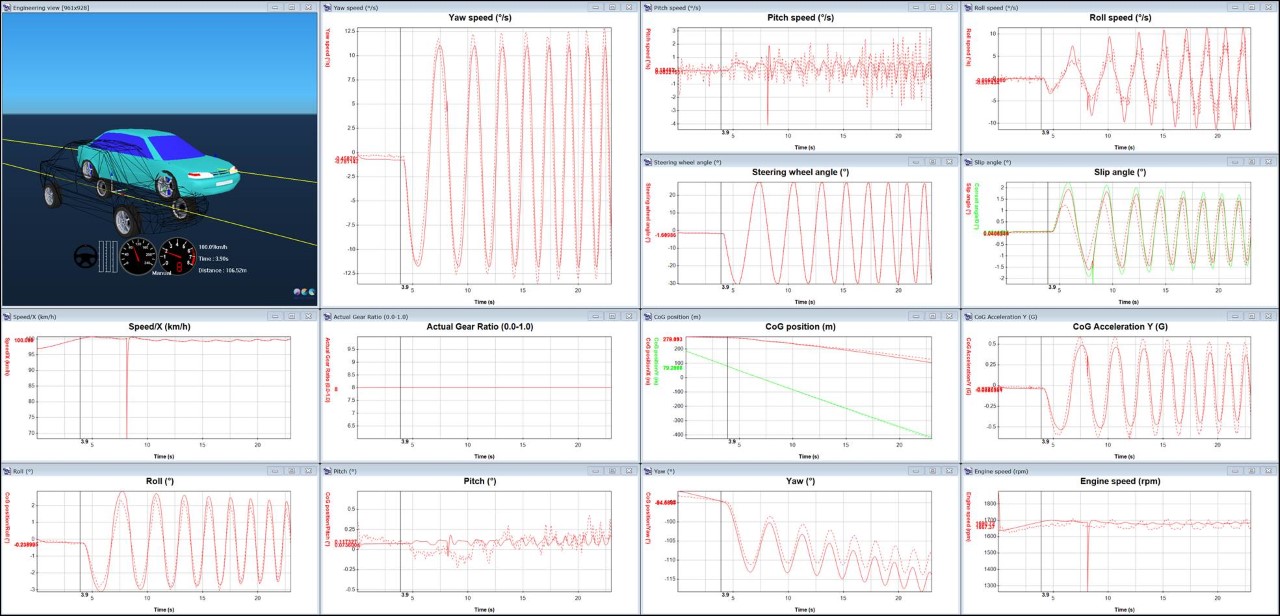
Il s’agissait justement de calibrer un modèle CALLAS dans son ensemble par rapport à des acquisitions diverses et variées (virages établis, Sinus-volant, évitements). On avait une bonne adéquation (< 10% d’écart) sur la plupart des objectives (trajectoire, régime moteur, roulis, angle de dérive, accélération latéral), et sur d’autres moins bonne (< 25% d’écart) qui nécessitait d’aller vers des niveaux plus réalistes de sous-modèles.
Un mot pour conclure ?
CALLAS est léger et rapide, mais détaillé et valide. Il est livré et prêt à être utilisé dans une grande variété d’applications et peut être utilisé pour les simulateurs, la validation HIL, la R&D en dynamique du véhicule et le Cloud computing. SCANeR est une plateforme ouverte qui supporte CALLAS et les logiciels concurrents de dynamique du véhicule au même niveau.