The Real Time Targets Pack is an essential tool for the validation of vehicle components (ECU, sensor, camera…) or of a model dedicated to be executed on a real-time target.
What for? To be able to interface your real time components with SCANeR and benefit from the input of realistic sensors and environments. Then under varying conditions, the components can be validated.

The Real Time Targets Pack allows to integrate, on a HIL platform (dSpace, National-Instruments…) your vehicle component, which can be the CALLAS vehicle, or a network (virtual CAN) that interfaces with the SCANeR software suite.
Together they bring an accurate, rich and representative environment to the driving simulation.
Need a complex road network? Urban network? Or extra urban? At AVSimulation we’ve got you covered. Cars with scripted or random behaviors can stimulate virtual sensors like Radar, Lidar etc. The accuracy of the virtual environment set up by SCANeR for HIL testing enables the complete validation of its components, achieved in order to reduce field testing phases and shorten development time.
The HIL compels a strict cadency on the equipment, operation and tested models. To meet current demands, SCANeR models on the HIL platform, and especially CALLAS RT, are real time. Genuine real time is a must; if a hardware component (ECU) doesn’t take this into account, malfunction or failure may occur. A simulation on a conventional computer isn’t sufficient to ensure perfect accuracy, as it requires an HIL platform.
The goal of the Real Time Targets Pack is to ensure perfect accuracy, for which multiple components are needed, namely RT Gateway and RT Callas. In other words, everything that is needed to connect to a real-time target is included.
SCANeR’s greatest asset is a virtual, rich and representative environment, including cars equipped with ADAS and sensors (Radar, Lidar etc.) and a multitude of complex urban and extra urban road networks. Additionally the Pack also includes random or scripted behaviors; everything one might need to conduct a driving simulation for the validation of equipment can be found in our Real Time Targets Pack.
USE CASES
Static VIL: Vehicle on a chassis dynamometer / direct drive dynamometer
Tests carried out on a fixed vehicle (immobile), only the wheels can still turn, the whole transmission chain remaining fully functional and used. Allows to test the entire real vehicle in a virtual environment. This allows to precisely evaluate the performances and the consumption of the vehicle.
Dynamic VIL: Real vehicle driven by a test driver on a test track
A real test is enriched with an additional virtual environment (e.g. virtual surrounding vehicles) and virtual sensors. This allows to test an ADAS in very realistic conditions.
HIL:
Testing and validating radar detection: by using an HiL bench we emulate radar targets. For example, with the car’s radar sensors, a lane change can be simulated with a vehicle on the left or on the right. The signals are then integrated into the driving simulation. The visual shows the position of the vehicle moving to the left or right, which is taken into account when making a decision: braking, stopping, or letting a vehicle pass.
Test SIL components (software in the loop)
The line between the PURE simulation and the HiL. The SiL depending on the configuration, is possible in real time or not. If the user wants to co-simulate or test the car’s software it is possible using a computer. The advantage of real time is to spot a failure in the system and be able to fix it immediately, saving time and money.
FEATURES
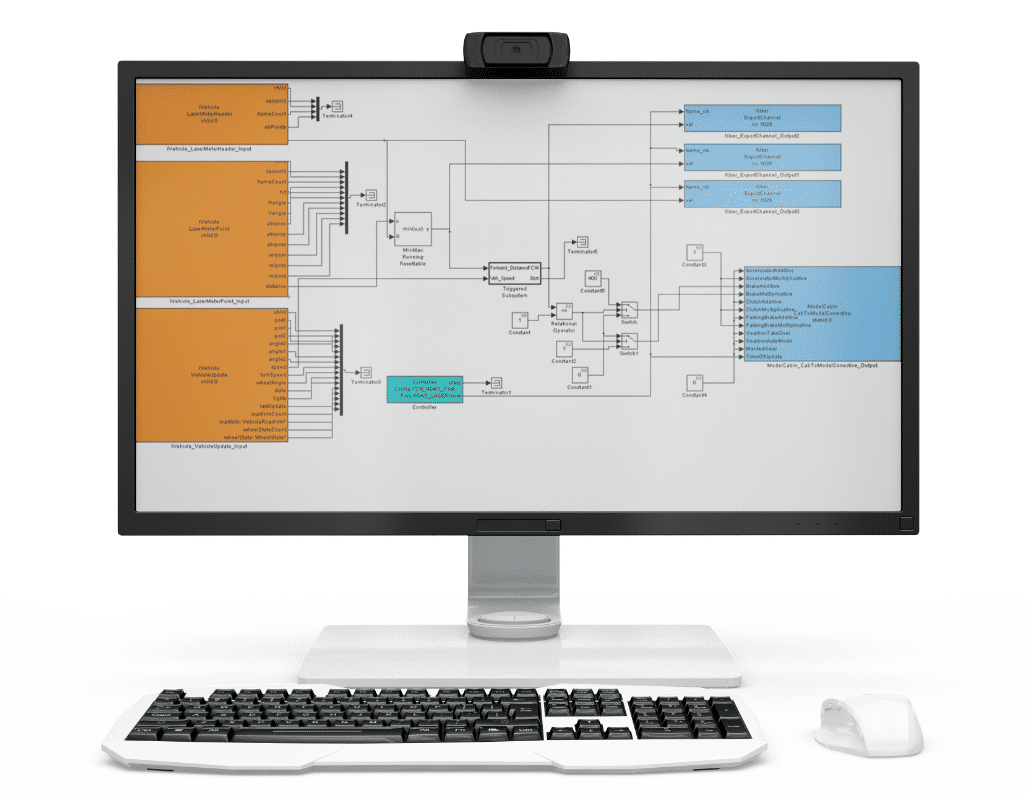
| ComUDP RT Interface |
For HiL applications using the dSPACE system, a ComUDP RT interface has been developed to easily connect to the ModelHandler module. This connection enables the RT platform to access vehicle inputs and outputs and allows the connection to any vehicle models such as CallasRT, which runs on the RT platform.
|
| Callas Real Time |
The CALLAS vehicle dynamics model can be easily deployed and executed on dSPACE real-time targets. It has been successfully tested and validated on the dSPACE ControlDesk real-time environment.
|
| Gateway Real Time |
Link between the real-time target and our driving simulation software, SCANeR.
|
| Interface to dSpace Real-Time platforms |
SCANeR supports dSpace Real-Time platforms for HIL applications. All the new modules and connections have been successfully validated on a dSPACE Realtime platform: a Callas RT vehicle dynamics model deployed and running on a dSPACE Scalexio RT Target. Special attention was paid to documentation to guide the user in using and setting up the dSPACE environment.
|
Note: The Callas API is not yet supported on dSpace, but can be implemented upon request.