The Foundation Pack is very special because it is the only one that can be used independently of the others. It is also the one with which all the other Packs work: it is, in a way, their common denominator. Moreover, when creating the new Packs, we deliberately chose to group around SCANeR all the necessary and sufficient components so that SCANeR’s reputation as an “All In One” software is reinforced.
In addition to SCANeR studio driving simulation software, the Foundation Pack includes the necessary tools to edit terrains, include cars and trucks in simulations, interface with vehicle dynamics models other than those already available in the Pack, etc.
Feel free to try the Samples Pack which includes a set of ready-to-use demonstrations of SCANeR features.
USE CASES


Terrain edition
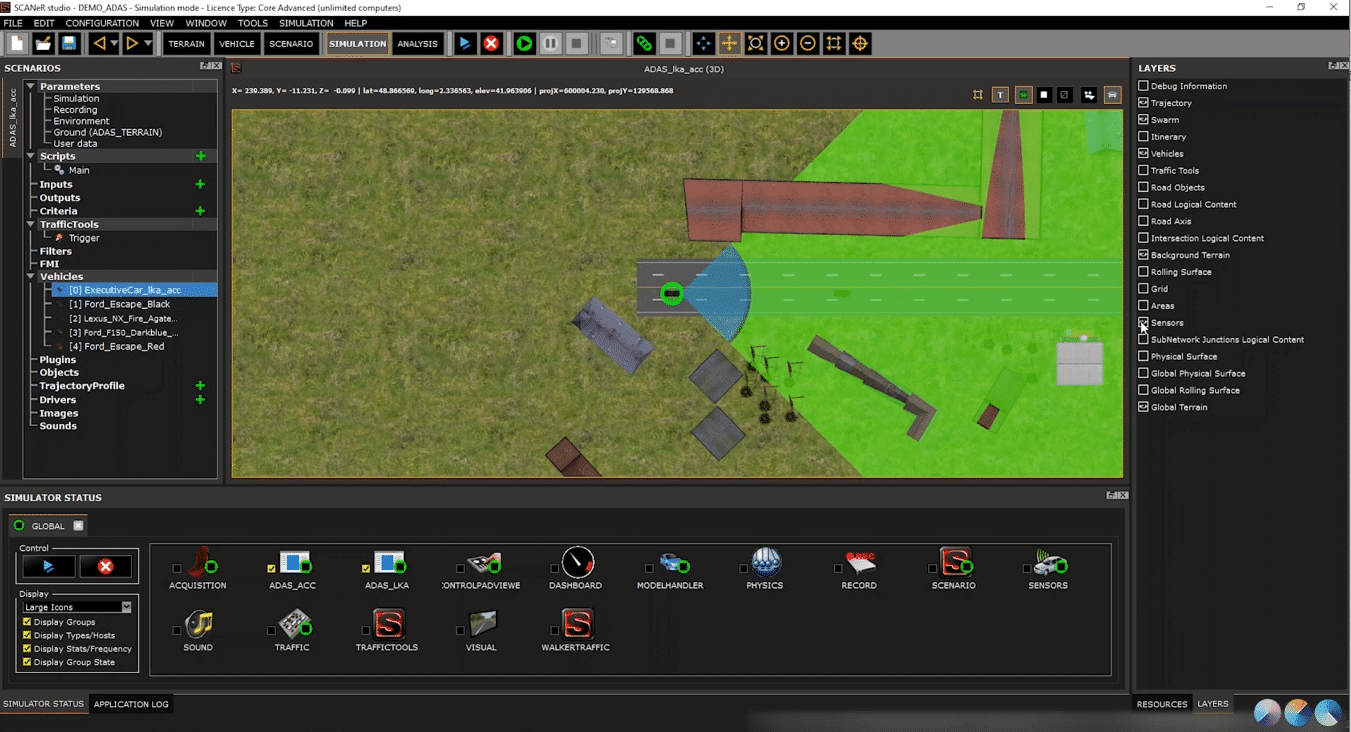
The Foundation Pack allows users to create environments such as road networks and their surroundings for their scenarios. 3D environments such as Europe 2 or N104 are good examples of what can be accomplished.
Scenarios creation
With the Foundation Pack, you are completely autonomous. It is possible for you to design your own scenarios. This covers field edition, traffic settings, and vehicle parameters. Many graphical interfaces are available to facilitate the scripting of your simulations. The description of the dynamics of the scenes is possible thanks to the native scripting language of SCANeR: MICE, and the Python language.
Analysis of results
The Foundation Pack enables you to analyze the results of your simulation, especially with the help of the data recorded with 3D views and videos. You can also export the data to Excel or to a CSV file.
Preparation of the tests
The SCANeR environment has the tools to monitor and analyze your simulations. You can record and replay your simulations infinitely. Once the scenarios are validated, they can be shared in order to run on a simulator or in a massive simulation context.
In addition, the Foundation Pack also allows you to use the CALLAS vehicle dynamics model.
Vehicle Dynamics
The Foundation Pack has the tools that allows interfacing with the SCANeR simulation of vehicle dynamics such as CarRealTime, Carsim, AMEsim or others. If you want to go further in the edition of your own vehicle dynamic, it may be a good idea to use the Vehicle Dynamics Pack.
License policy
The creation of the new packaging was also the perfect opportunity to clarify a licensing policy that was already in place but not always well understood. From now on, there are only two types of software licenses.
Nomadic: the license is distributed on a physical dongle. This format is dedicated to the people who need to move their license from one computer to another. It may be the case if the user regularly moves between their desktop and a laptop on the test tracks. In this case, it is important not to lose or damage the dongle.
Fixed: the license is distributed in a file. The licence is attached to one computer, and therefore not movable. This is the type of license to choose if you want to install a license on a specific computer or if you want to install multiple licenses on a computer that will act as a tokens server. Of course, this computer must remain switched on and be accessible by network.
The two cases are summarized in the following illustration:

It is important to note that in terms of cost, there is no difference between the configurations. Take time to explain your use case to our engineers and we will give you the best advice concerning which type is best for you.
More importantly, note that in both cases, you have a license server that enables you to have the configuration from any other computer (see the Server column above). We understand that in the 21st century, the omnipresence of networks makes wanting to get theses licenses, without additional costs and regardless of where they are located, legitimate.
Let us take two examples to establish this concept. If you leave your computer on at the office and can still access it through a VPN, it is then possible to use your license from another site or at home. The office computer behaves like a license server capable of sharing only one token at a time. It does not matter if the license in the office is on a dongle or on a file. The only requirement is that the computer stays on.
In a more classical way, if a fixed license has about ten license tokens, after setting them up, they can be used by different employees who have access to the server and obtain a token. This is an essential step when it comes to supporting companies in their standardization process surrounding SCANeR.
In other words, making the choice to use the SCANeR platform is the guarantee to benefit from floating licenses usable everywhere and by all, without additional costs.
FEATURES
| SCANeR studio |
SCANeR studio is organized around the following simulation workflow:
|
| Driver |
The Driver feature controls the main interface between the software and the actual cockpit.
|
| Scenario |
The Scenario module (included in the Foundation Pack) specifies in a precise way the course of the simulation: variation of the environment, behavior of the actors of the simulation, …
|
| CALLAS Vehicle dynamics model (Runtime) |
The Foundation Pack includes a library of the premium CALLAS vehicle dynamics models ready to be used for high-end driving simulators and automotive engineering:
This Pack offers a wide range of trucks, buses, industrial or off-road vehicles (for example agricultural machinery)
|
| Visual |
The Visual module, included in the Foundation Pack, calculates and generates hyper-realistic images from the 3D environment to offer a complete immersive experience to drivers. Wondering how to choose the right number of Visual modules for your configuration? If your simulation platform requires more than one display, we recommend using one Visual module per graphics card. You can use several graphics cards in a single PC or distribute them to several workstations connected in networks. If you need to display the 3 mirrors of a vehicle, it is possible to optimize the number of Visual modules by entrusting the display of these mirrors to a single graphics module. Do not hesitate to discuss these aspects with our sales engineers.
|
| Sound |
The Sound feature creates a virtual 3D audio environment for the simulation in real-time.
|
| Physics |
The Physics module enables handling 3D collisions and physics behavior of simulation objects with Interactive & Traffic vehicles, Pedestrians, Bicycles, Infrastructure objects and Crash barrier.
|
| GPS sensor |
The GPS sensor module allows simulation of a GPS sensor: the position of a vehicle equipped with this sensor is converted into wgs84 using RoadXML© projected information.
|
| Traffic and Pedestrian |
The Traffic and pedestrians feature gives access to the Traffic, Walkertraffic and Traffictools modules, which allow to have vehicles driven in an automatic and realistic way in a simulation, without prior parameterization.
|
| FMI Handler |
The FMI Handler feature allows you to integrate FMUs (Functional Mock-up Unit) in the simulation loop with respect to the FMI 2.0 standard (Functional Mock-up Interface).
|
| Simulation Engine: SDK |
Studio’s Software Development Kit (SDK) is a set of Application Programming Interfaces (APIs) that offers the possibility for users to exchange data, synchronize platforms and systems, interface algorithms and strategies(…).
|
| Scenario Importer |
The Scenario importer tool generates a SCANeR scenario from real data, which allows to recreate in simulation scenes measured in reality.
|
| Included Data Sets |
The default data set includes data for:
|
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W AMD Ryzen 7 7700X / Ryzen 9 7900X AMD ThreadRipper Pro 5955X |
| RAM | 16 GB | 64 GB |
| Network | 1 Gbps | 1 Gbps |
|
HDD (supervisor PC) |
500 GB |
500 GB SSD (>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) |
Quadro P5000 GeForce GTX 1080 |
High End NVIDIA Quadro RTX A5000/RTX A6000 (ADA) GeForce RTX 4080/RTX 4090 |
| OS | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10 64 bits
Linux (only for supported modules):
-
- Ubuntu 20.04 LTS
- Centos 7.9
Development
Visual C++ 2019 and 2015
Python: 3.9 on Windows, 3.8 on Ubuntu, 3.7 on Centos
Matlab Simulink 2016b and 2019b
Unreal Engine 4.27.2 (only for advanced customization or asset production)