| Engine |
- The engine performances are dependent on the environmental conditions (temperature, humidity)
- The fuel consumption and pollution are calculated
- Electric or hybrid powertrain can be define while keeping the engine
|
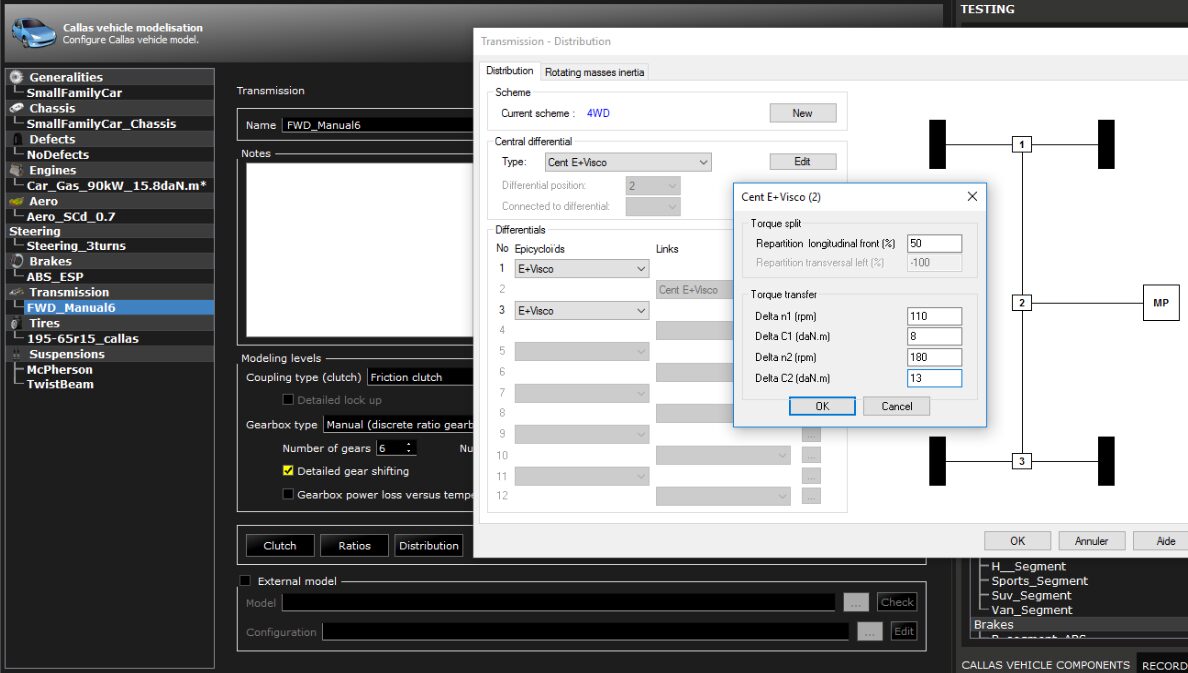
| Transmission |
- Clutch, CVT and torque converter are available
- The gearbox can have up to 20 gears, with short/long transfer, 2 reverse gears, automatic gearboxes have a lockup
- The automatic gearbox strategy can be edited
- Any conventional power distribution can be setup (FWD, RWD, 4WD)
- Any kind of differentials (free, rigid, limited slip differential, viscous coupling, torsion, with locker, etc.)
|
| Suspension |
- Nonlinear suspension elasticity (spring, damper and bumps)
- The heave suspension of racing cars is available (mono-shock or 3 suspensions)
- Dampers are sensible to travel acceleration and temperature
- Anti-roll bars are nonlinear and have damping effect
- Rigid and twist beam axles are available
|
| Steering |
- All wheels can steer with individual nonlinear laws
- Steering torque is calculated in detailed with extract kinematics
|
| Tires |
- Tire grip model can be one of the standard Pacejka models (Michelin, Pacejka, MFTyre up to 5.2, etc.)
- A physical model is available; the parameters are physical data easily understandable (not pure mathematical coefficients)
- Grip is temperature dependent
- Inflate pressure can be changed
- Internal hard tire for flat rolling is available
- Tire / ground interaction is calculated in 3D with a validated theory for sharp obstacles
- Grip depends on ground properties (dry, wet, soft ground)
- Aquaplaning is modelled
- There is a specific low speed model based on tire elasticity (necessary for parking manoeuvres)
|
| Electronics |
- ABS, ASR, ESP
- Cruise control, automatic gearing and automatic clutch are available
|
| Aerodynamics |
- Full wind tunnel map can be used
- Wind in the earth referential from any direction and speed
|
| Brakes |
- Brakes can be hydraulic, pneumatic or electrical
- Limiters can be linked to wheel/axle travel, suspension pressure, etc
- Retarder (electrical on gearbox, driveline, or valve at exhaust pipe)
|
| Miscellaneous |
- It is possible to remove a load from reference state (inertia matrix is automatically recomputed)
- Friction depends on vehicle load
- The real sensors are also simulated (measurement artefacts, filtering…)
- User can create defects on tires, brakes, engine, steering system, clutch, suspensions …
|
| Engine and driveline |
- Electrical engine (with batteries and power generation by thermal engine)
- Instant torque is time dependent
- Mechanical or electrical driveline
- Suspensions
- Temperature can vary
- Elasto-kinematic compliance are nonlinear with hysteretic effect
- Steering column and rack/rod have nonlinear stiffness
- Power steering map is variable with speed
- Aerodynamics
- Ground effect
- Braking
- Non-linear brake torque
- Time response and hysteresis
- Temperature influence and variation
|
| Tires |
- Pacejka converter to physical model is available
- Temperature can vary
- Internal rubber (type ATS) for flat tire situations
|
| Chassis |
- Vehicle can be loaded with static and mobile loads (oscillating masses or a liquid spread into several tanks)
- The chassis can be flexible
|
| Included simulation modules |
- Access to the VEHICLE mode for CALLAS Edition
|