Driver in the Loop The concept of driving simulators emerged in the 1930’s for research on traffic safety. The concept shown here by DeSilva in 1936 is already close to some simulators used these days. At the time, the idea was already to bring the driver into...
Can you introduce yourself? I am Valérie Dognin, I’m Product Owner at AVSimulation for 3 years. I am in charge of SCANeR Roadmap and more particularly on Terrain and Visual subjects. Can you give us a quick and simple definition of OpenDRIVE?...
Before simulation, validation of new systems under test (complete vehicles, ADAS command law, headlights, etc.) were only physical tests, which means that we deployed several versions of prototypes on a track in order to make sure that the behavior is what was...
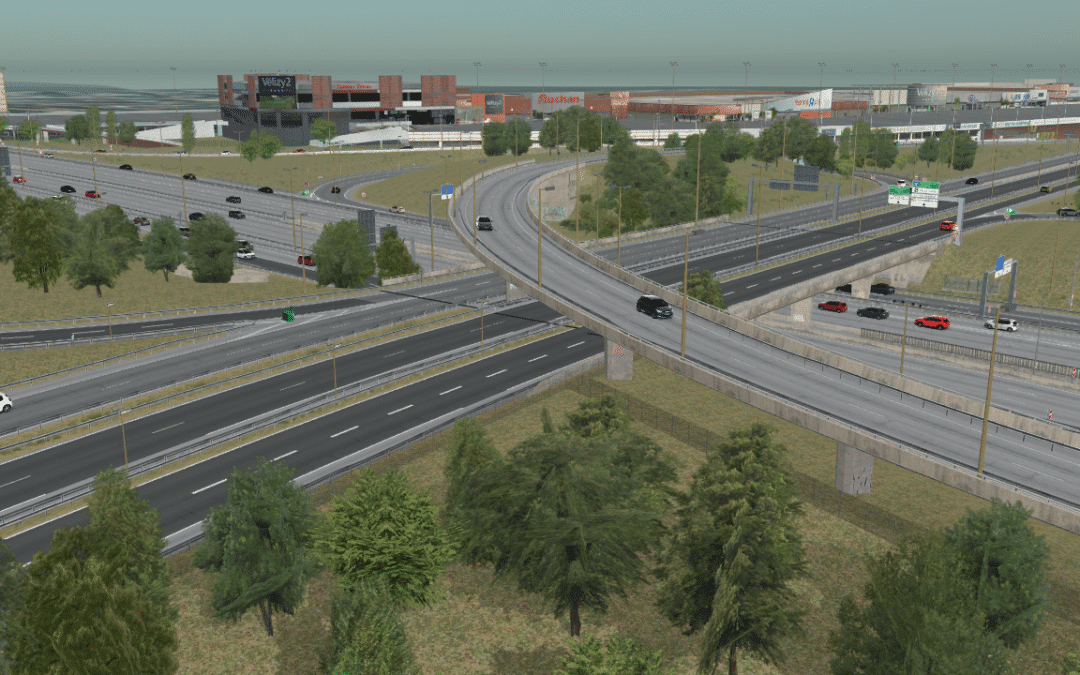
Autonomous vehicles are real. Combination of different sensors (cameras, radars or LiDAR) allow vehicles to take its environment (weather, other vehicles, pedestrian, etc.) into account and therefore accelerate, turn, break autonomously. Automotive simulation has...
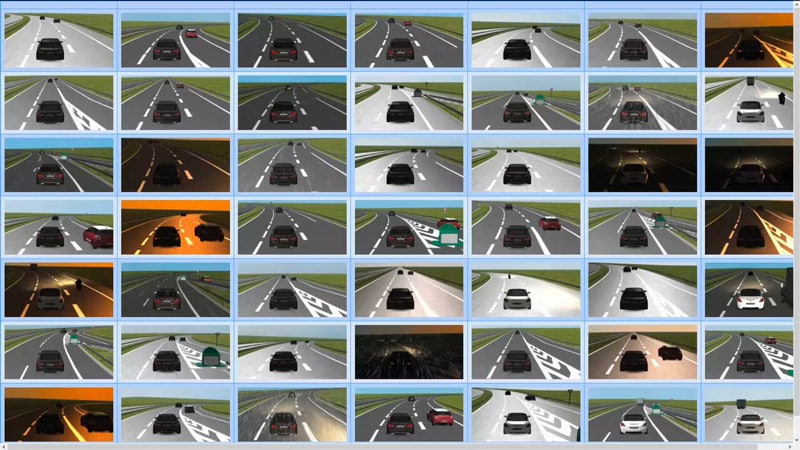
Can you introduce yourself in a few words? My name is Alex GRANDJEAN and I have worked at AVSimulation for 6 years, as product owner and project manager. I am an expert in scenarisation, traffic simulation and HPC. I am involved for more than 4 years in SVA and 3SA...