
Driver in the Loop
The concept of driving simulators emerged in the 1930’s for research on traffic safety. The concept shown here by DeSilva in 1936 is already close to some simulators used these days.
At the time, the idea was already to bring the driver into a driving position, reproducing the stimuli used by the brain to conduct the tasks of driving. Today’s simulators are based on the same concept.
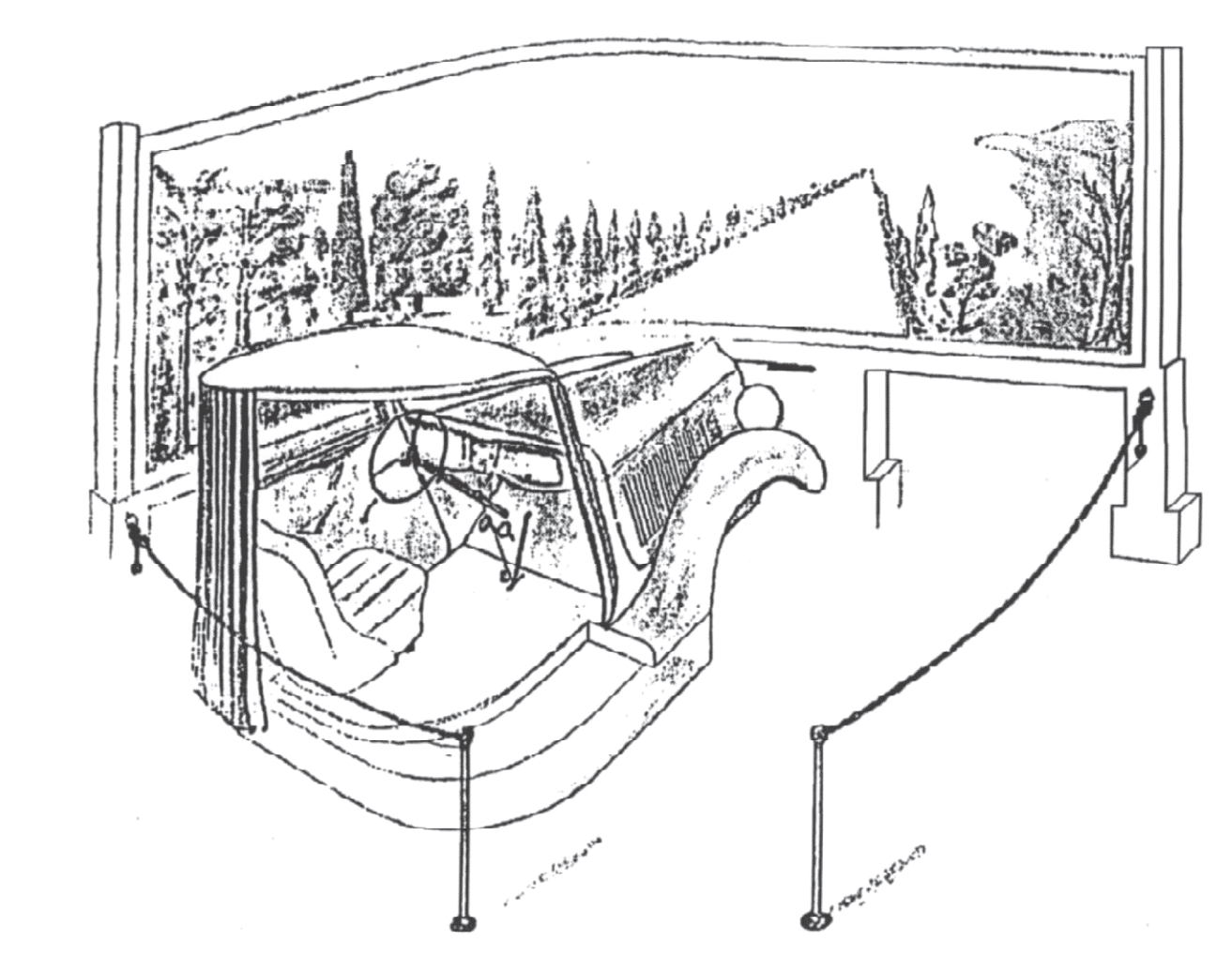
DeSilva, 1936
This kind of simulator is named “driver-in-the-loop” (DiL), because it feeds the driver with cues (auditory, visual, …) to enable them to accomplish the usual tasks of “driving”, and the actions of the driver are used as inputs to compute the dynamics of the vehicle.
Simulators which range in size from small to very big are rendering these inputs and outputs with a gradual level of fidelity.
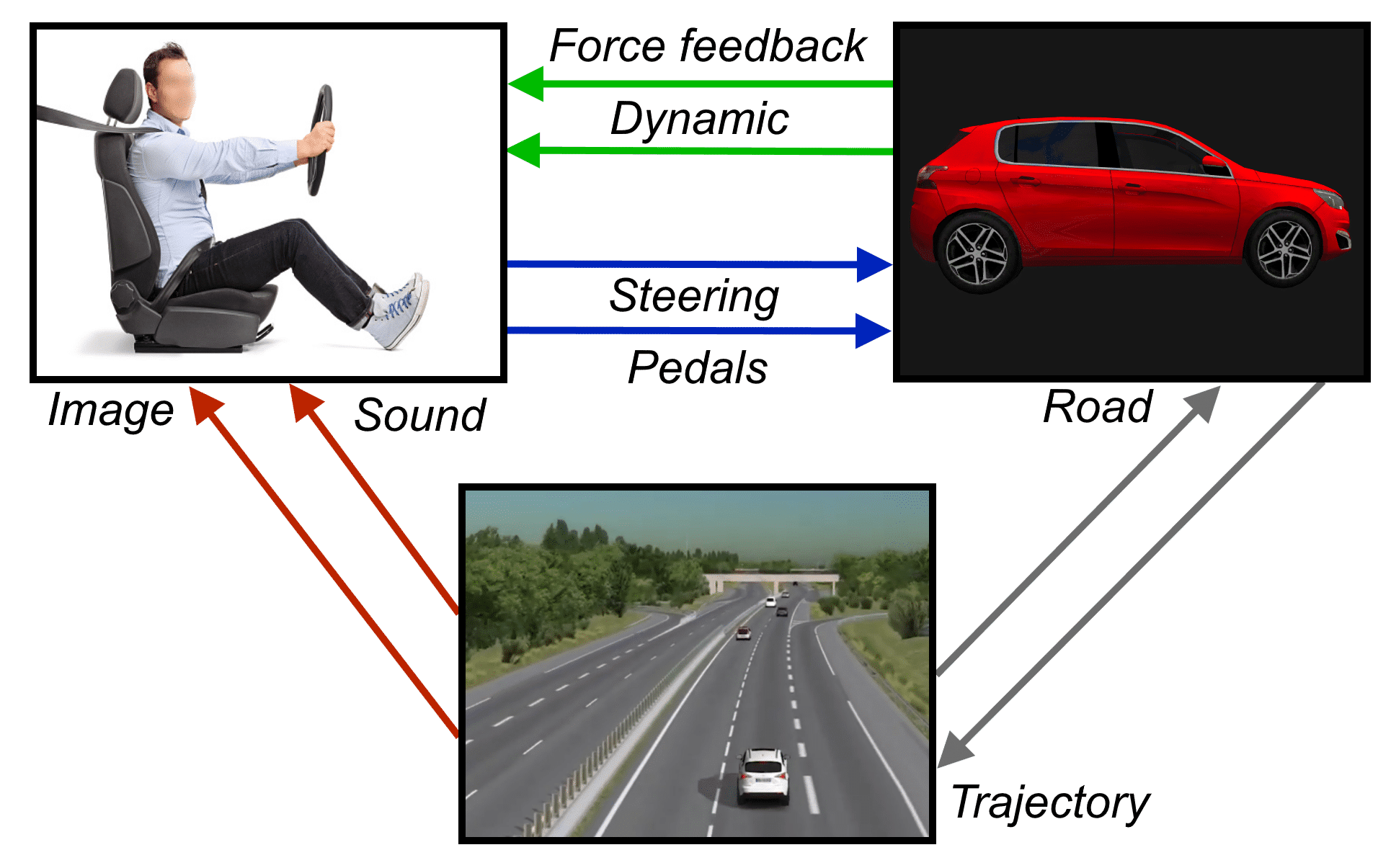
Driver in the loop diagram
Even in “driver in the loop” simulators, the focus point is not always the driver. They can also be used to test hardware or software in realistic situations when a real driver is behind the wheel.
What makes a good DiL simulator ?
In the wide variety of available solutions, what makes a good DiL simulator, and how do you choose the best solution for your use case?
If we draw a parallel with video gaming, a car racing gamer will focus on several elements of their equipment:
- The screen: the wider, the better
- The input hardware: usually a steering wheel gaming controller
- The seat: a bucket seat feels like being in a real racing car
- The software: better graphics for more immersion
While gaming focuses on the impression of realism and thrill, simulation for vehicle development focuses more on an accurate representation of reality. Each component is calibrated.
The display
A wider display increases the perception of speed, thanks to object outside the road running on the peripheral vision of the driver. Buta good display has other challenges, such as readability and comfort during the driving simulation.
While driving, the focus point of the driver can go far ahead. They need to be able to distinguish traffic signs, objects and other road users despite their size on screen. Some road markings end-up very small on screen if they are far away in the simulation. Similarly, when driving at higher speed – on highways for instance – fixed traffic signs on the road side are only readable if the display’s refresh rate is high enough. The angular resolution and refresh rate of the display are therefore critical for readability.
As for simulator sickness, while it affects each user in a different way, the methods to minimize it are always the same. The coherence between the cues, as well as between driving simulation and the real world, are key. In addition to the technical specifications of the screen, proper calibration is very important in order to have best performance, and accuracy of the virtual world to represent the real world.
| Speed perception | Readability | Comfort of simulation |
| Resolution and scene details Better with 3D Lateral view |
Resolution and pixel accuracy Contrast Frequency Smearing Reduction |
Field of View (Immersion) Frequency |
Display criteria for simulation
The technologies available to reach appropriate specifications vary greatly, and the choice depends also on premises constraints, such as available space, dimensions or power supply, and on the available budget, as well as on the primary use case.
Examples of display technologies:

Monitor

VR HMD

CAVE

Projection

LED wall
The input hardware plays an important role in the immersion of the driver. While a computer keyboard could be used, DiL simulators generally use at least a steering wheel and pedal controllers.
On the steering side, a more powerful and responsive force-feedback wheel will add more realism to the dynamics of the vehicle, and of the road effects. It also allows for actual full-sized steering wheels, even those taken from real vehicles. This is unlike smaller reproductions that often attached to gaming steering wheels.
Pedals also have feedback, either passive or active. Passive allows for realistic feeling, and may offer the possibility to mechanically adjust the level of resistance. Only active pedal feedback can render special effects from the vehicle dynamics and from the road, such as vibration due to surface roughness, or the action of an ABS.
Finally, the decorative parts of the cockpit range from a desktop with on-screen instrument panels to complete, actual car cockpits with active clusters. The available space and intended level of immersion drive the selection of a cockpit. If versatility is a criterion, modifiable elements will be preferred. For example, by using a screen instead of a physical cluster.
Examples of cockpit hardware:
| Steering wheel | Pedals | Decoration |
| Game steering-wheel controller Performance steering-wheel FFB |
Passive Passive adjustable Active |
Desktop Dashboard imitation Actual dashboard Front half of a car Entire car |
A more comprehensive, full-scale cockpit tricks the driver into feeling they are getting inside an actual car. But the absence of movement betrays this illusion, and introduces discomfort. It is essential that the realism of the cockpit be homogeneous with the level of feedback of the display, and of the motion system.
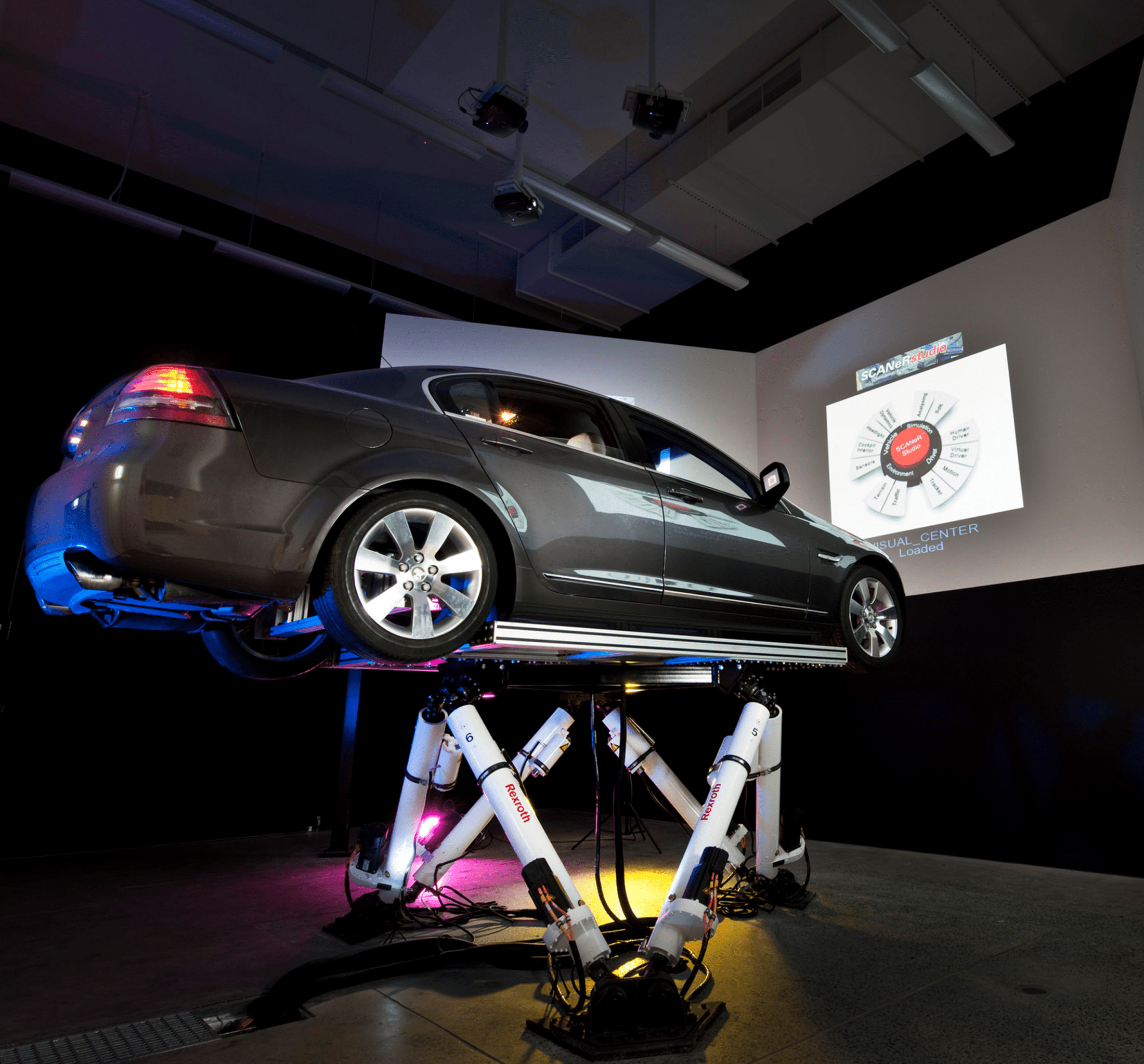
The motion system
A simulator without a motion system is called “static”. The motion system makes a simulator “dynamic” to improve immersion and comfort of driving simulation.
Movements are detected by the human body through the inner ear, and through direct contact on the rest of the body. The challenge is to provide the driver with the linear acceleration, rotational speed and special effects they expect while driving – based on their actions, the dynamics of the vehicle and the environment. The coherence between what the driver sees and what they feel ensures that they can forget they are in a simulator, and behave more accurately as if they were on the road.
When driving without motion cues, it feels like riding a “magic carpet”. No event in the simulation seems to have a real impact to the driver. To prevent this, the first cues that a motion system reproduces are small effects, like road vibration or gear shifting. Small effects focus on the contact areas like the steering wheel, the pedals and even the seat. Active force-feedback of the steering wheel and pedals are used. For the seat, vibration or piston actuators can be used. At this point there is still no real “degree of freedom” in the motion (0 DoF).
The first 3 DoF enable larger amplitude events to be cued – for example when the driver starts braking, accelerating, turning, or when a road bump is hit. This enhances the realism of driving, as the driver now feels when the event occurs. Their reaction time can calibrate based on the cues.
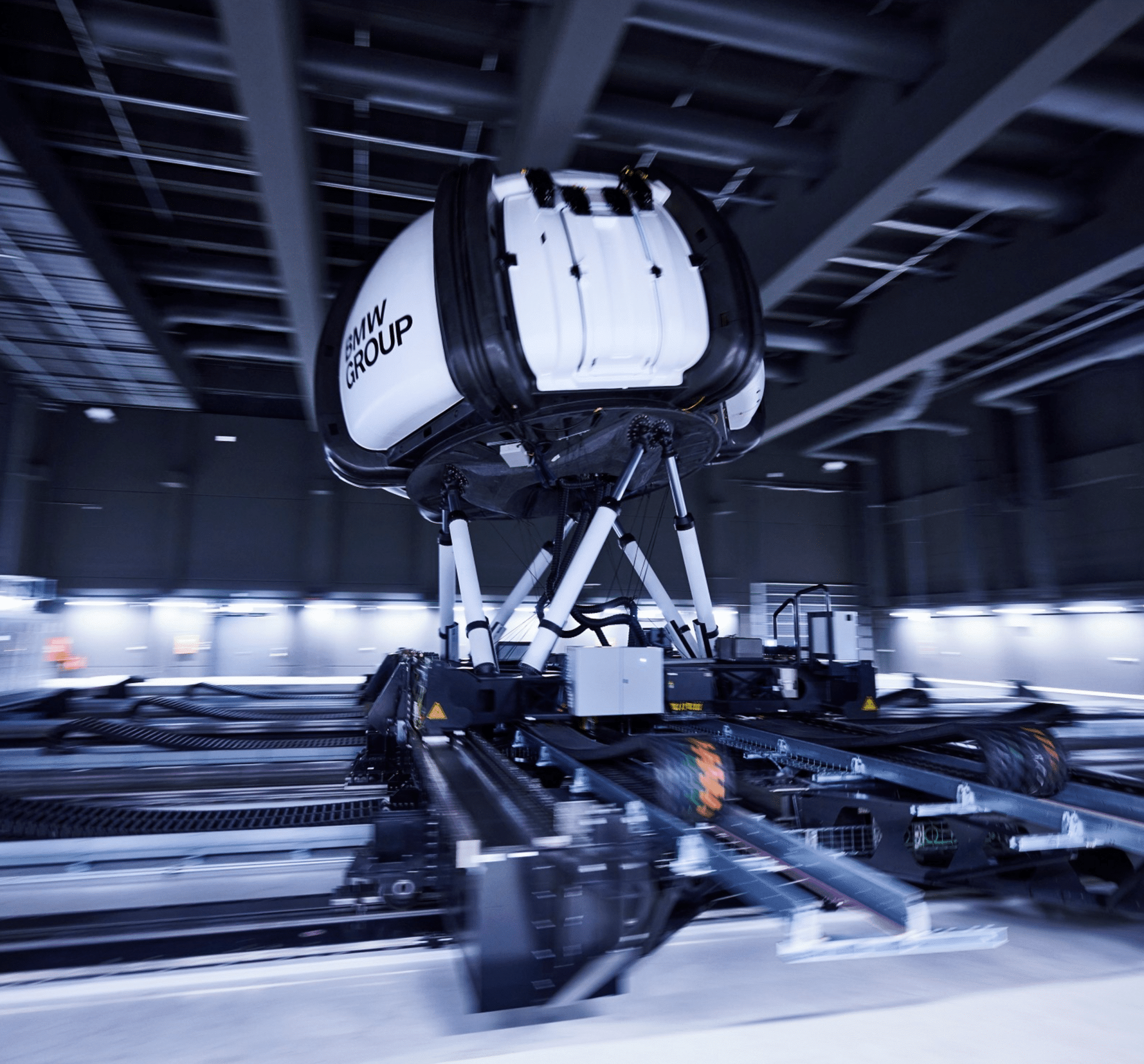
The 6 DoF, 9 DoF or more allow the cueing of even larger scale amplitudes, and to measure them out. The driver feels the dynamics of the vehicle. They can moderate their actions based on the strength of the reproduced effects. For example, the speed in a curve, or the brake force.
Ranges of degrees of freedom.

Special effects
6 DoF and more
6 DoF and more
Reproducing larger amplitudes of motion, such as centrifugal force (lateral) or acceleration and braking pushes (longitudinal) implies gradually heavier hardware. The movements themselves require more travel distance. However, it is also the driver who decides the next movement. At all times, the simulator must be ready to react to a variety of actions that the driver could choose.
The larger travel distance available on each axis, the better the feedback can be. And in order to optimize the utilization of any available travel distance, anticipation is key. Reproducing movements at a 1:1 scale to reality at all times is not possible, as it eventually leads to reaching mechanical limits. The balance between the immediate accuracy of feedback and continuity of immersion is the role of the motion cueing software.
The software
The driving simulation software is responsible of generating all cues, managing the virtual world and reading the driver’s inputs. It basically closes the loop, by substituting for everything that doesn’t exist in the physical simulator.
All the users see and feel is the result of accurate models. The vehicle dynamics ensures realistic vehicle behavior based on driver commands. The 3D rendering must be realistic enough for immersion, and the surrounding actors, such as pedestrians and traffic, must behave in a coherent, seemingly natural way.

SCANeR studio supervision view
In the case of SCANeR studio, the software is also where you design experiments, configure models and prepare key performance indicators for later analysis. The features extend all across the development and testing cycle, allowing teams and skills collaboration on the same models.

Some SCANeR studio Packs: the what
Finally, the software allows the exploitation of the simulator’s hardware. It must be open and allow the connection and configuration of the wider range of possible hardware. SCANeR studio also embeds the necessary tools for calibration, which as seen before is critical for optimal exploitation. This is just as true for DiL as for other platforms used for automotive simulation (Desktop, HiL, Massive Simulation, …). All within the same software.

Some SCANeR studio Packs: the how
Wrap up
Bigger, more powerful, and more expensive doesn’t always mean better. From the beginning it is important to make the educated, well researched decision when selecting a solution in order to get the most optimized result for a use case, or for multi-purpose challenges.
AVSimulation’s solution starts from the clear definition of needs for the proper operation of your DiL simulator. Take advantage of decades of experience in driving simulators commissioning and exploitation.

AVSimulation’s team is looking forward to hear about your DiL needs.
For more information, don’t hesitate to visit our catalogs.
Written by Guillaume Adam.