Le Pack Foundation est très particulier car il est le seul à pouvoir être utilisé indépendamment des autres. C’est aussi celui avec lequel tous les autres Packs fonctionnent : il est, en quelque sorte, leur dénominateur commun. De plus, lors de la création des nouveaux Packs, nous avons délibérément choisi de regrouper autour de SCANeR tous les composants nécessaires et suffisants pour que la définition de logiciel « All In One » de SCANeR soit renforcée.
En plus du logiciel de simulation de conduite SCANeR studio, le Foundation Pack comprend les outils nécessaires pour éditer les terrains, inclure des voitures et des camions dans les simulations, s’interfacer avec des modèles de dynamique de véhicules autres que ceux déjà disponibles dans le Pack, etc.
N’hésitez pas à essayer le Pack Samples qui comprend un ensemble de démonstrations prêtes à l’emploi des fonctionnalités de SCANeR.
CAS D’USAGE


Edition de terrain
Le Pack Foundation permet de créer des environnements tels que des réseaux routiers ainsi que leurs alentours pour vos scenarios. Les environnements 3D tels que Europe 2 ou N104 sont de bons exemples de ce qui est possible de faire.
Création de scenarios
Avec le Pack Foundation vous êtes complètement autonomes et à même de concevoir vos scénarios. Cela recouvre l’édition de terrain, le paramétrage du trafic et de votre véhicule. De nombreuses interfaces graphiques sont disponibles pour faciliter la scénarisation de vos simulations. La description de la dynamique des scènes est possible grâce au langage de scripting natif de SCANeR : MICE, et du langage Python.
Analyse des résultats
Le Pack Foundation vous permet d’analyser les résultats de vos simulations, notamment grâce aux données enregistrées avec des vues 3D et des vidéos. Vous pouvez également exporter les données vers Excel ou dans un fichier CSV.
Préparation des essais
Sans avoir besoin de scripter tous les acteurs mis en jeu, vous pourrez très rapidement lancer vos premières simulations. L’environnement SCANeR possède les outils qui vous permettront de monitorer et d’analyser vos simulations. Vous pouvez enregistrer et rejouer vos simulations à l’infini. Une fois les scénarios validés ils seront partagés afin d’être exécutés sur un simulateur ou dans un contexte de simulation massive.
Dynamique de Véhicule
Le Pack Foundation dispose des outils qui permettent d’interfacer la simulation de conduite SCANeR avec des dynamiques de véhicules externes telle que CarRealTime, Carsim, AMESim ou autres. Si vous souhaitez aller plus loin dans l’édition de votre propre modèle de véhicule dynamique, il sera sans doute judicieux d’utiliser le Pack Vehicle Dynamics.
Par ailleurs, le Pack Foundation vous permet également d’utiliser le modèle dynamique CALLAS.
La politique de licence
La création du nouveau packaging a été l’occasion de clarifier une politique d’utilisation des licences qui était déjà en place mais qui n’était pas toujours bien comprise. Dorénavant on ne distingue plus que deux cas d’usage de la licence logicielle.
Nomade : la licence est distribuée sur une clé USB. Ce format est destiné aux personnes qui ont besoin de déplacer leur licence d’un PC à un autre. Cela peut être le cas si l’utilisateur navigue entre son bureau et des pistes d’essais. Dans ce cas d’usage il est important de ne pas perdre et de ne pas endommager la clé USB.
Fixe : La licence est distribuée par le biais d’un fichier. Elle est rattachée à un seul PC. Elle n’est donc pas déplaçable. Typiquement, c’est le type de licence à choisir si l’on souhaite installer une licence sur un PC portable ou si on souhaite installer plusieurs licences sur un PC qui fera office de serveur de jetons. Bien sûr, le PC en question doit rester allumé et doit être accessible par réseau.
Les deux cas de figures sont résumés dans l’illustration suivante :

Il est important de noter qu’au niveau du coût, il n’y a aucune différence entre les deux configurations. Prenez le temps de nous expliquer votre cas d’usage et nos ingénieurs vous conseilleront ce qui répond le mieux à votre besoin.
Notez que dans les deux cas, vous disposez d’un serveur de licence et que ce dernier vous permet de disposer de cette configuration à partir de n’importe quel autre PC (voir la colonne Serveur ci-dessus). En effet, nous considérons qu’au XXIème siècle l’omniprésence des réseaux fait qu’il est légitime de vouloir disposer de ses licences, sans surcoût, quel que soit l’endroit où l’on se trouve.
Prenons deux exemples pour illustrer ces explications. Si vous laissez votre PC allumé au bureau et si vous pouvez y accéder à travers un VPN, vous pourrez utiliser votre licence à partir d’un autre site ou de votre domicile. Le PC au bureau se comporte comme un serveur de licence capable de ne partager qu’un jeton à la fois. Peu importe qu’au bureau la licence soit sur une clé USB ou dans un fichier. Le principal étant que le PC reste allumé.
De manière plus classique, si une licence de type Fixed comporte une dizaine de jetons de licences, après paramétrage, ces derniers pourront être utilisés par différents collaborateurs susceptibles d’accéder au serveur et d’obtenir un jeton. C’est une démarche essentielle lorsqu’il s’agit d’accompagner les entreprises dans leur démarche de standardisation autour de SCANeR.
En d’autres termes, faire le choix de la plateforme SCANeR, c’est s’assurer de bénéficier des licences utilisables partout et par tous, sans surcoût.
FONCTIONNALITES
| SCANeR studio |
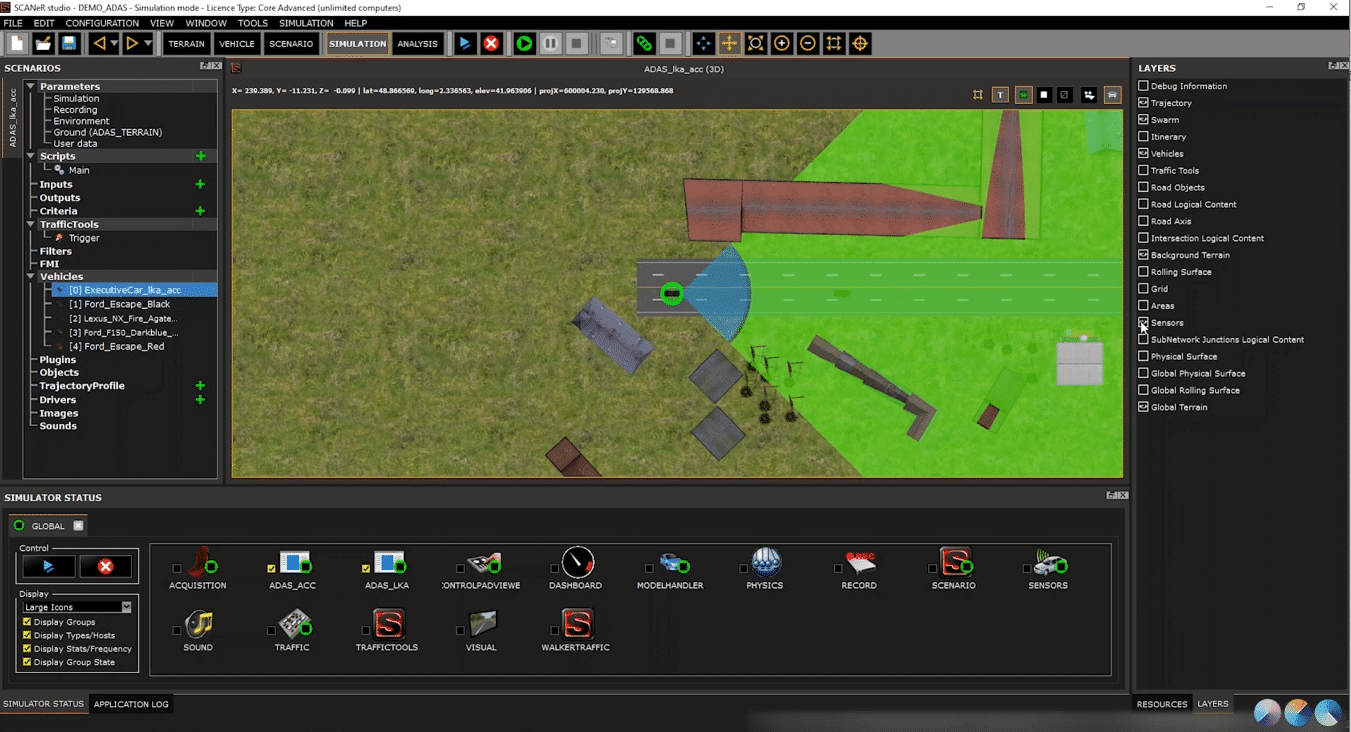
SCANeR studio est organisé autour du flux de simulation suivant :
|
| Driver |
Le module Driver contrôle l’interface principale entre le logiciel de simulation de conduite et le cockpit actuel.
|
| Scenario |
Le module Scenario (inclue dans le Pack Foundation) spécifie de manière précise le déroulement de la simulation : variation de l’environnement, comportement des acteurs de la simulation, …
|
| CALLAS Vehicle dynamics model (Runtime) |
Le Pack Foundation comprend une bibliothèque des modèles de dynamique de véhicules haut de gamme CALLAS prêts à être utilisés pour les simulateurs de conduite haut de gamme et l’ingénierie automobile :
Le Pack propose une large gamme de camions, bus, véhicule industriels ou off-road (comme par exemple des machines agricoles).
|
| Visual |
Le module Visual, inclut dans le Pack Foundation, calcule et génère des images hyper réalistes à partir de l’environnement 3D pour offrir une immersion complète aux conducteurs. Comment choisir le bon nombre de modules Visual de votre configuration ?
|
| Sound |
La fonctionnalité Sound crée un environnement audio 3D et virtuel pour la simulation en temps réel.
|
| Physics |
Le module Physics permet de gérer les collisions 3D et le comportement physique des objets de simulation avec les véhicules en circulation, les piétons, les vélos, les objets d’infrastructures et la barrière de collision.
|
| GPS sensor |
Le module GPSsensor ermet de simuler un capteur GPS : la position d’un véhicule équipé de ce capteur est convertie en wgs84 à l’aide des informations projetées par RoadXML.
|
| Traffic and Pedestrian |
La fonctionnalité Traffic and pedestrians donne accès aux modules Traffic, Walkertraffic et Traffictools, qui permettent d’avoir des véhicules pilotés de manière autonome et réaliste dans une simulation, sans paramétrage préalable.
|
| FMI Handler |
La fonctionnalité FMI Handler, inclue dans le Pack Foundation, permet d’intégrer les unités de maquette fonctionnelle dans la boucle de simulation avec le respect des fonctionnalités standards FMI 2.0.
|
| Simulation Engine : SDK |
L’outil SDK est un ensemble d’interfaces de programmation d’applications (API) qui offre la possibilité aux utilisateurs d’échanger des données, de synchroniser des plateformes et des systèmes, des algorithmes d’interface et des stratégies.
|
| Scenario Importer |
L’outil Scenario importer génère un scénario SCANeR à partir de données réelles, ce qui permet de recréer en simulation des scènes mesurées en réalité.
|
| Included Data Sets |
L’ensemble de données par défaut comprend les données suivantes :
|
RECOMMANDATIONS DE LA PLATEFORME
Matériel informatique
| Minimum (pour l’ancien système) | Recommandé (pour les nouveaux systèmes) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W AMD Ryzen 7 7700X / Ryzen 9 7900X AMD ThreadRipper Pro 5955X |
| RAM | 16 GB | 64 GB |
| Réseau | 1 Gbps | 1 Gbps |
|
HDD (PC superviseur) |
500 GB |
500 GB SSD (>=1TB SSD for supervisor) |
| Carte graphique (Visuel du PC) |
Quadro P5000 GeForce GTX 1080 |
High End NVIDIA Quadro RTX A5000/RTX A6000 (ADA) GeForce RTX 4080/RTX 4090 |
| OS | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Résolutions du moniteur | Full HD (1920×1080) | 4K (3840×2160) |
Logiciel
OS
Windows 10 64 bits
Linux (uniquement pour les modules pris en charge) :
-
- Ubuntu 20.04 LTS
- Centos 7.9
Développement
Visuel C++ 2019 et 2015
Python : 3.9 sur Windows, 3.8 sur Ubuntu, 3.7 sur Centos
Matlab Simulink 2016b et 2019b
Unreal Engine 4.27.2 (uniquement pour une personnalisation avancée ou la production d’éléments 3D)