Our Physics Based Sensors Pack is specially designed for engineers who need to design or validate sensor perception algorithms. This Pack contains sensor simulation tools based on advanced modeling of physical phenomena. The Physics Based Sensors Pack offers a complete solution for advanced and realistic modeling which will facilitate validation by simulation.
The Pack is made up of a number of tools and generic two-level sensor models:
- Level 3, called “Full Physics“, aims to achieve a very high level of realism without making any concessions to physics.
- It offers a very detailed modeling of signal propagation in the environment and of signal perception by the sensor. It enables accurate reconstruction of raw signals to supply the perception algorithms. The first sensor available at this level of modeling is the Radar sensor. Also included are tools for preparing the simulation, enriching the description of the scene and its objects with materials describing their physical properties and analyzing the results at the end of the simulation.
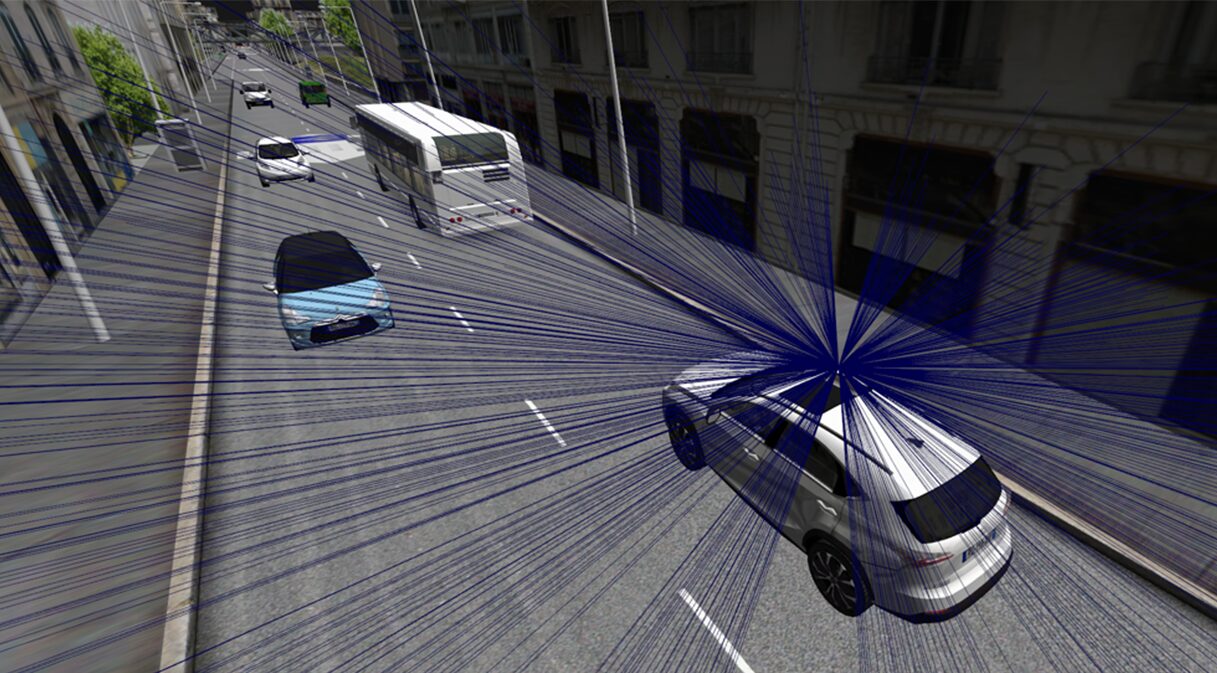
- Level 2, called “Real Time Physics”, uses the physical principles described previously by optimizing them to favor the performance of calculations. It also includes generic processing algorithms for delivering outputs at an intermediate level. Two sensors are modeled at this level: the Radar sensor and the Lidar sensor.
Training
At your request, AVSimulation offers training so you and your teams can use, understand and configure the sensors offered in this Pack completely independently. Our teams of experts can also guide and help you with the modeling of vehicles, equipment or systems.
USE CASES
Complete and representative environment
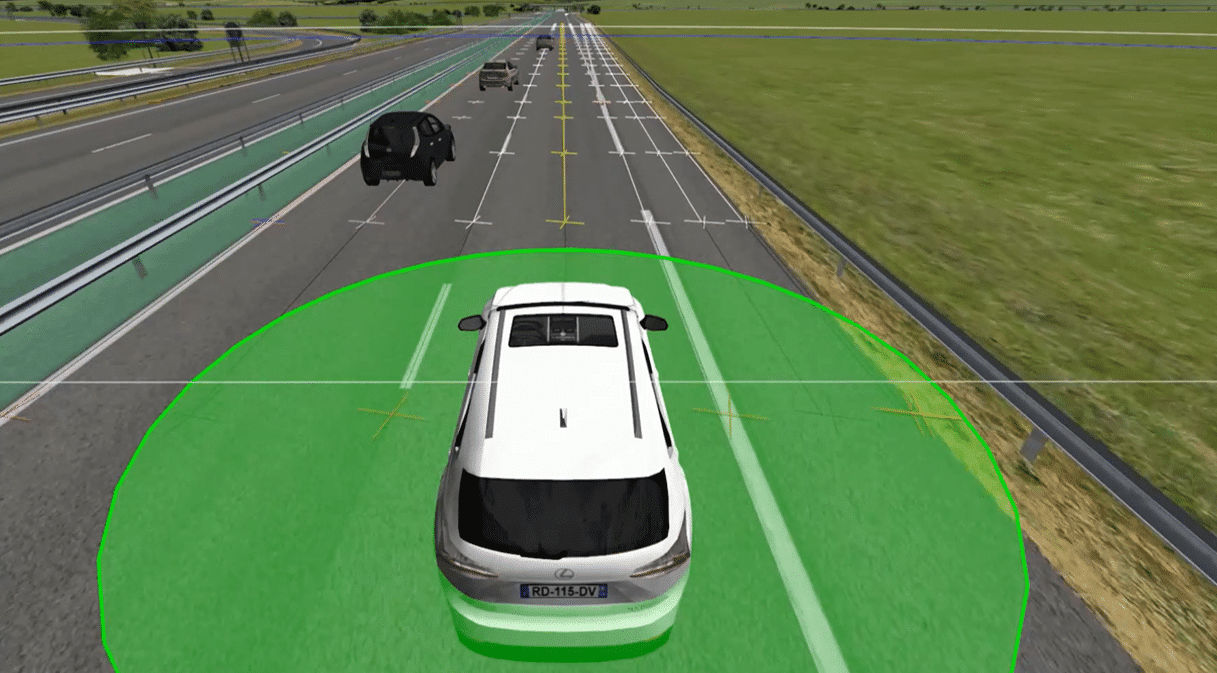
The Physics Based Sensors Pack allows you to check the influence of the scenario and the environment on perception. A precise modeling of the propagation allows the user to identify the weak points of the perception algorithms in complex situations, and to analyze and improve them in order to obtain the desired result.
Operational safety
Operational safety is at the heart of discussion surrounding autonomous vehicles. How can we be sure that our vehicle will not have an accident? That it does not endanger the lives of its drivers? AVSimulation has the answer for you, and offers precise sensor models already used by sensor manufacturers and research institutes, which will help anticipate risks and design a safe and efficient vehicle.
Development process
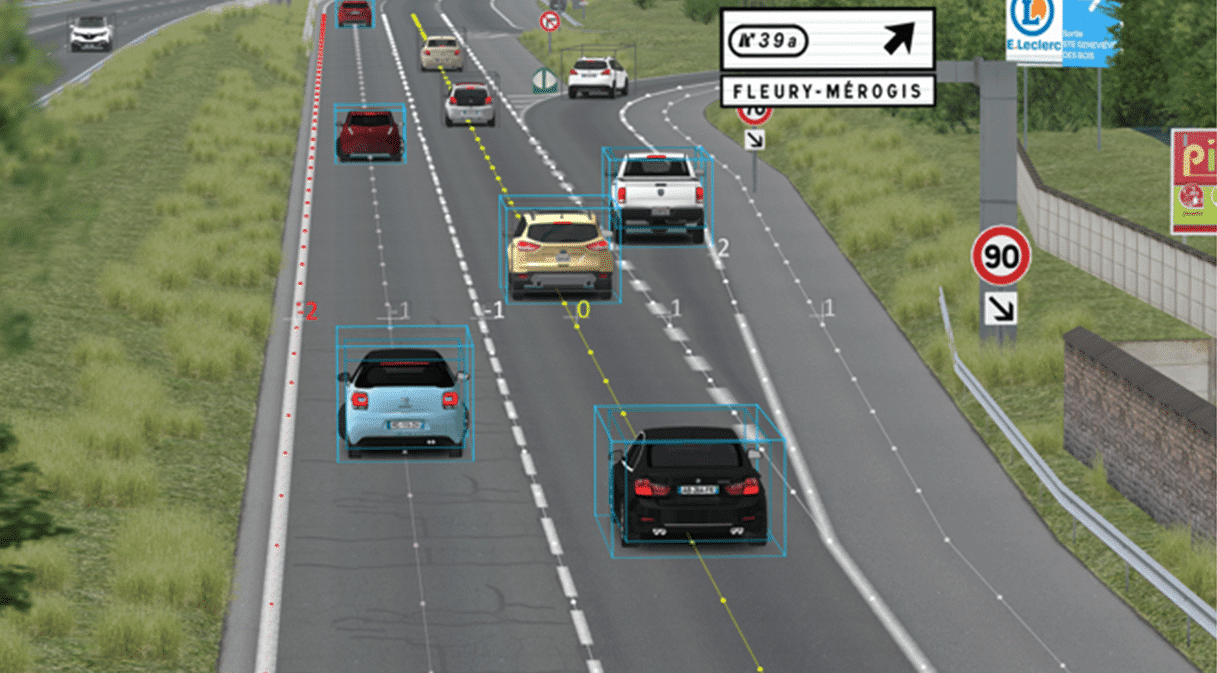
Used early on in the V-Cycle, the Pack allows design and sizing choices to be made. Depending on the capabilities of the different types of sensors and the area of the signal requested, users can choose the best sensor technology for their needs, capable of detecting objects in complex situations, and study beforehand the potential performance of the perception system.
Validation
Using sensors throughout the validation process, the engineer will be able to verify proper function and performance of their system in different types of situations.
HIL (Hardware in the Loop)
Used in HIL simulation, our solution enables simulation of the environment in great detail and to interfacing with the real sensor, either by injecting the signal directly into the sensor or by transmitting the information “directly” to its on-board algorithms.
FEATURES
Characteristics of the real-time physical sensors, developed in collaboration with OKTAL-SE and fully integrated into SCANeR.
| Physics Based Radar | Optimized modeling of a physical radar sensor. |
| Physics Based Lidar | Optimized modeling of a physical lidar sensor. |
| Module Physical Edition & Conversion | Enrich the simulation environment with physical materials. |
Characteristics of the “full” physical sensors, developed in collaboration with OKTAL-SE and fully integrated into SCANeR.
| Full Physics Radar | Faithful modeling of a physical radar sensor. |
| Module Physical Edition & Conversion | Enrich the simulation environment with physical materials. |