Le Pack Real Time Targets est l’outil indispensable pour la validation d’un composant véhicule (ECU, capteur, camera…) ou d’un modèle dédié à être exécuté sur une cible temps-réel.
Pourquoi ? Notre Pack permet d’interfacer votre composant avec SCANeR et ainsi de bénéficier d’un environnement et d’entrées capteurs réalistes. Le composant peut alors être validé dans des conditions représentatives.

Le Pack Real Time Targets permet d’intégrer, sur une plateforme HIL (dSpace, National-Instruments…) votre composant véhicule, qui peut être le véhicule CALLAS, ou encore un réseau CAN virtuel qui vient s’interfacer avec la suite logicielle SCANeR.
Ensemble, ils apportent un environnement de simulation de conduite virtuel, précis, riche et représentatif.
Besoin d’un réseau routier complexe ? Urbain ? Ou extra-urbain ? Nous l’avons. Des voitures au comportement aléatoire ou scripté permettent de stimuler les capteurs virtuels : Radar, Lidar, etc. La représentativité de l’environnement virtuel proposé par SCANeR pour le test en HIL permet de valider de façon complète le composant afin de réduire la phase de test sur le terrain et de raccourcir le temps de développement.
Le HIL impose un cadencement strict du fonctionnement des modèles et du matériel testé. Pour répondre à ce besoin, tous les modèles SCANeR qui sont sur la plateforme HIL, et notamment CALLAS RT, sont en « temps réel dur ». Le temps réel dur est une contrainte forte. Un composant matériel (ECU) risque de fonctionner anormalement ou de se mettre en défaut s’il n’est pas respecté. Pour assurer une rigueur parfaite sur le cadencement, une simulation sur PC classique n’est pas adéquate, il faut une plateforme HIL.
L’objectif du Pack Real Time Targets est d’assurer cette précision. Pour faire cela, plusieurs composants sont nécessaires : RT Gateway, RT Callas. Pour résumer, le nécessaire pour se connecter à une cible temps réel.
CAS D’USAGE
VIL statique : Véhicule sur banc à rouleaux / banc à entrainement direct
Tests menés sur véhicule fixe (immobile), seules les roues peuvent encore tourner, toute la chaine de transmission restant par ailleurs pleinement fonctionnelle et utilisée. Permet de tester l’intégralité du véhicule réel dans un environnement virtuel. Ceci permet notamment d’évaluer de façon précise les performances et la consommation du véhicule.
VIL dynamique : Véhicule réel conduit par un pilote essayeur sur une piste d’essai
On enrichie un test réel avec un complément d’environnement virtuel (par exemple des véhicules environnants virtuels) ainsi que des capteurs virtuels. Ceci permet de tester un ADAS dans des conditions très réalistes.
HIL : Test et validation des radars de détections
Par l’utilisation d’un banc HIL nous émettons des cibles radar. Par exemple : avec les capteurs radars de la voiture, on peut simuler un croisement avec un véhicule à gauche ou à droite. Les signaux sont alors intégrés à la simulation de conduite. Le visuel, lui, permet de montrer le positionnement du véhicule passant à gauche ou à droite et d’en tenir compte pour prendre une décision : freiner, s’arrêter, laisser passer un véhicule.
Tester les composants SIL (Software In the Loop)
Frontière entre la simulation pure et le HIL. Le SiL selon les configurations, est possible en temps réel ou non. Si l’utilisateur souhaite faire de la co-simulation de conduite ou bien tester le logiciel de la voiture cela est possible, en utilisant un PC générique. L’avantage du temps réel est de repérer un bug et de pouvoir le corriger dans l’immédiat. Faisant gagner temps et argent.
FONCTIONNALITES
| ComUDP RT Interface |
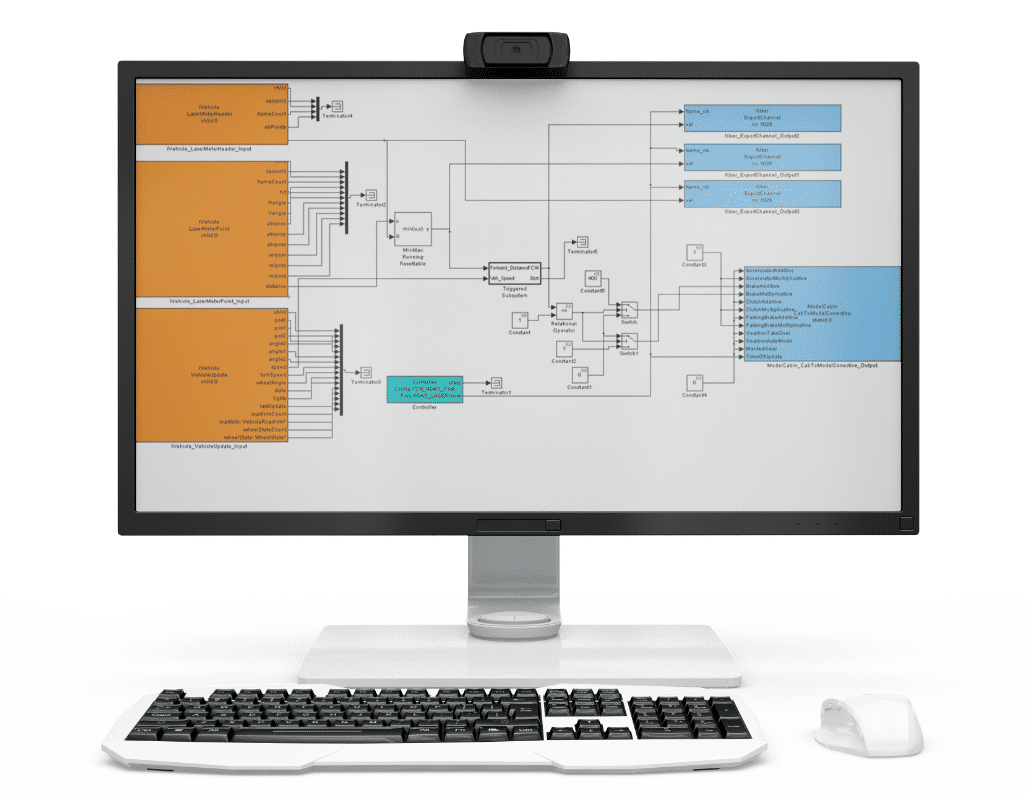
Pour les applications HIL qui utilisent le système dSPACE, une interface ComUDP RT a été développée pour faciliter la connexion au module ModelHandler. Cette connexion permet à la plateforme RT d’accéder aux entrées et sorties du véhicule et permet une connexion à tous les modèles de véhicules tels que CallasRT, qui s’exécuteraient sur la plateforme RT.
|
| Callas Real Time |
Modèle de dynamique du véhicule qui supporte toutes les fonctionnalités de CALLAS mais sur une cible temps réel.
|
| Gateway Real Time |
Fait le lien entre la cible temps réel et notre logiciel de simulation de conduite, SCANeR.
|
| dSpace Real-Time platforms |
SCANeR dispose désormais de dSpace Real-Time pour les applications HIL. Tous les nouveaux modules et connexions ont été validés avec succès sur la plateforme dSpace Real-Time : un modèle de véhicule dynamique Callas RT roulant sur un dSPACE Scalexio RT Target. Une attention singulière a été accordée à la documentation permettant de guider l’utilisateur dans l’utilisation et la configuration de l’environnement dSPACE.
|
Note : L’API de Callas API n’est pas encore supportée sur dSpace, mais peut être mise en place sur demande.