SCANeR 2022.2 Release Note
AVSimulation is proud to announce that SCANeR 2022.2, the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help to solve the challenges of developing, testing and evaluating autonomous and advanced driving functions through intensive use of the simulation all along the R&D process.
The main topics are improvements of UXD engine to support VR applications, glare computation from reflective materials in Headlight mode, a new tool to physicalize objects to prepare Physics Based Sensor simulation and many bug fixes for improved performance and stability.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- UXD engine improvements to support VR applications,
- Improvement of LakeCity 3DEnvironment for photorealistic rendering with UXD engine
- Glare computation from reflective materials in Headlight mode,
- A new tool to physicalize objects to prepare Physics Based Sensor simulations
- New NCAP 2023 protocols and NCAP scenario compatibility with massive simulation
- Many bug fixes for improved performance and stability
Introduction
This release note describes the new features and evolutions available in SCANeR 2022.2.
With respect to the new packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR to create models, integrate systems, simulate and analyse results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulation, 3D environments
- Other applications: Education, Training Sim
Bug fixes
This version of SCANeR also includes all bug fixes and improvements from previous releases, including SCANeR 2021.2, 2022.1 and customer-specific versions.
UXD Engine (powered by Unreal)
Note: UXD Engine is not yet capable of addressing all SCANeR Use Cases. Consequently, the original VISUAL module, based on Open Scene Graph, is still available.
New features
VR/XR headset
UXDRender is now compatible with VR/XR device. User has to activate an option on the cfg file to be able to connect a VR/XR device with UXDRender.
Tracking features are also compatible with many VR/XR headset (ex: Vive Pro).
Warning : This feature requires a strong configuration like RTX6000 graphic card with minimum 32Go of RAM
Cockpit editor
UXDRender can now load .xcpt files and manage all cockpit editor features:
- Opacity
- Eye point
- Variant
Retrovision: only if raytracing is active and needs specific tag on the mirror mesh.


Improvement
Lake City Improvements
Our default terrain Lake City has been improved to take advantage of Unreal rendering:
- Replacement of old assets by Unreal assets
- Improvements of the road/marking/building’s textures
- Addition of urban objects
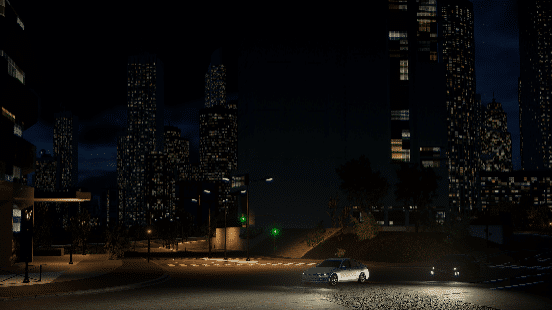
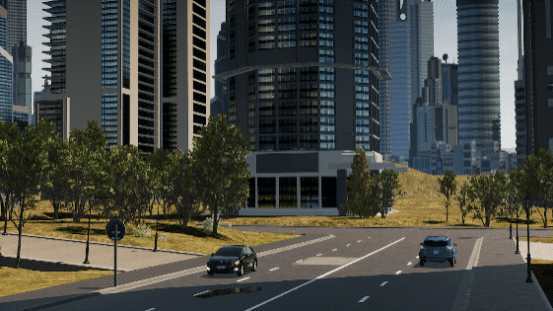

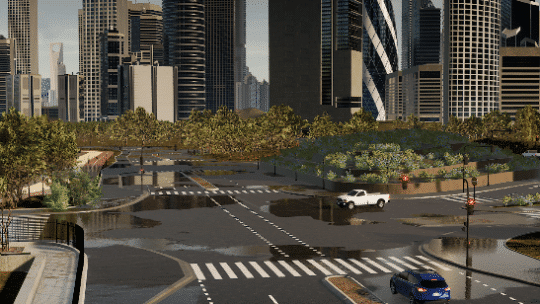

This version of LakeCity is named LakeCity_HD and is available on the DEFAULT files.
Warning : This new version of LakeCity requires a strong configuration like RTX6000 graphic card with minimum 32Go of RAM. We advise to deactivate the RayTracing option for better performance.
Rain effect improvements
We made some improvements on the rain effect to increase the realism.
We also add the windshield function and the impact of the rain on the windshield. This function will be improved in a further version.


Support of named export channels
The transition though the Name/Category Export Channel has been taken a step further, with more support for named export channels, and no more export channels by ID. Notably, named export channels are now supported in ControlPad.


Glare calculation from traffic sign reflection
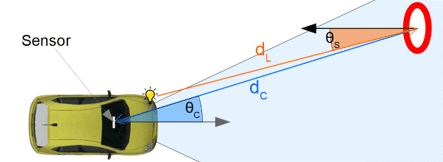
To use anti-glare strategies in Adaptative Front-lighting System (AFS), Camera sensor is now able to outputs the glare caused by the vehicle’s headlights.
To do so, the illuminance and luminance are computed for each reflector, as well as the reflected intensity emitted by the reflector toward the sensor, taking into account the BRDF of the surface, and its area.
The glare is calculated by the DeBoer formula, taking into account the angle of incidence of the light emitted by the reflector.
The glare is accessible through a new Camera sensor output, named Reflectors in ISensor network message.
Physicalization of resources
A resource physicalization mechanism has been implemented, allowing the user to physicalize himself the resources (vehicule or object) he wants to integrate in his scenario. The physicalized resources can then be directly used to be detected by the L2 or L3 radar models.

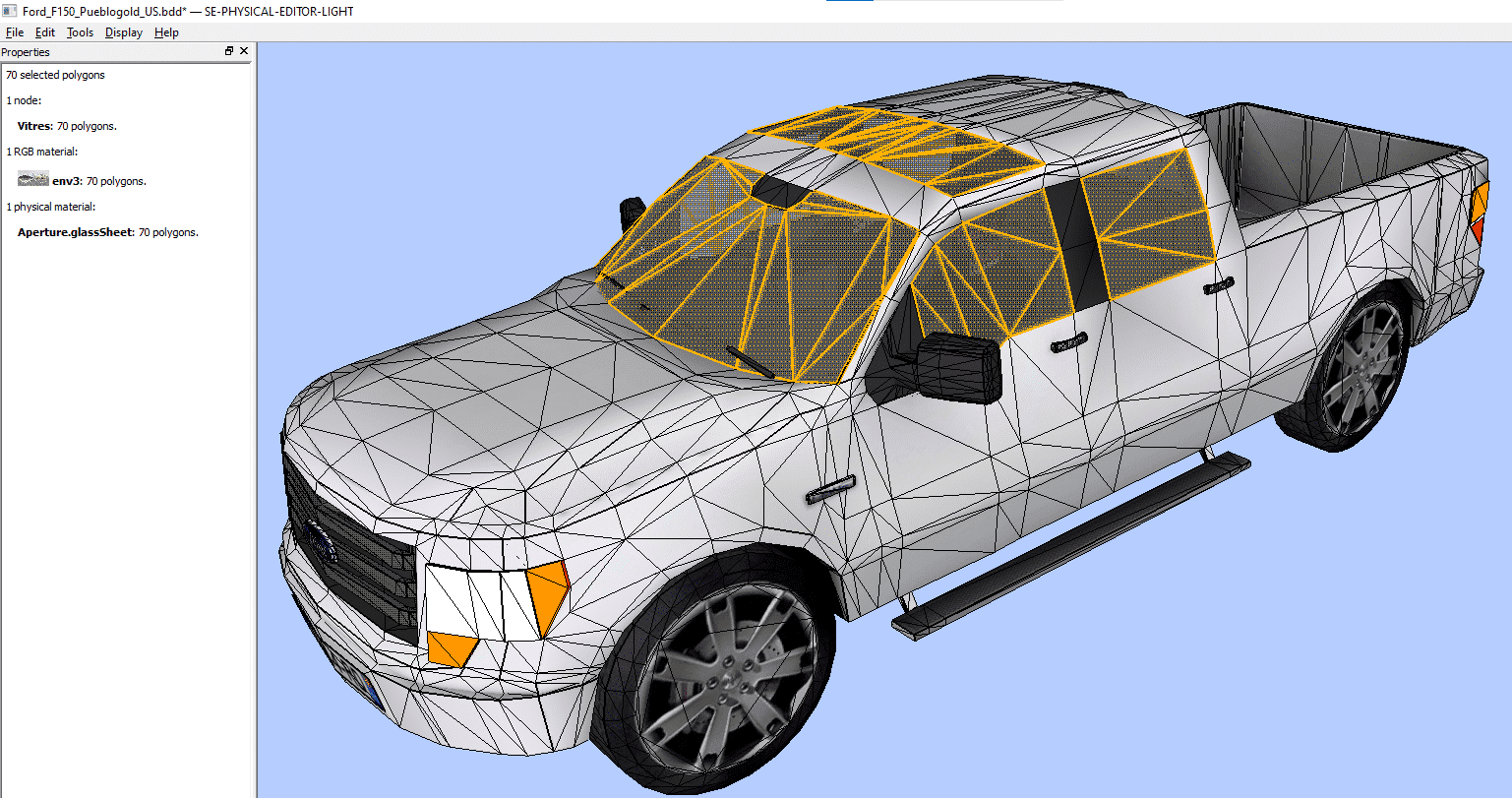
Physicalization tool
A physicalization tool is now available in SCANeR. Named SE-PHYSICAL-EDITOR-LIGHT, it allows to assign physics properties to the materials of simulation assets.
The physicalization process itself is very fast and easy to perform, thanks to a clear and uncluttered interface.
The objects that can be physicalized are:
- Vehicles (car, motorcycle)
- Cyclists
- Road signs
- Any kind of object: building, scenery or security element
This tool uses the same physicalization engine as the one used for terrains generated from SCANeR, already accessible in the TERRAIN mode. As such, the physicalized terrains can also be opened with this tool, for verification purpose or modification of the physical materials used.
This tool is available as an Option of the PHYSICS BASED SENSOR PACK.
Available in July 2022

2023 update from official protocols
Euro NCAP has recently published the official protocols for upcoming AEB and LSS tests from January 2023. Further to this publication, we updated the Euro and Australian pack according to the new texts. Australian NCAP is based on Euro NCAP protocols.
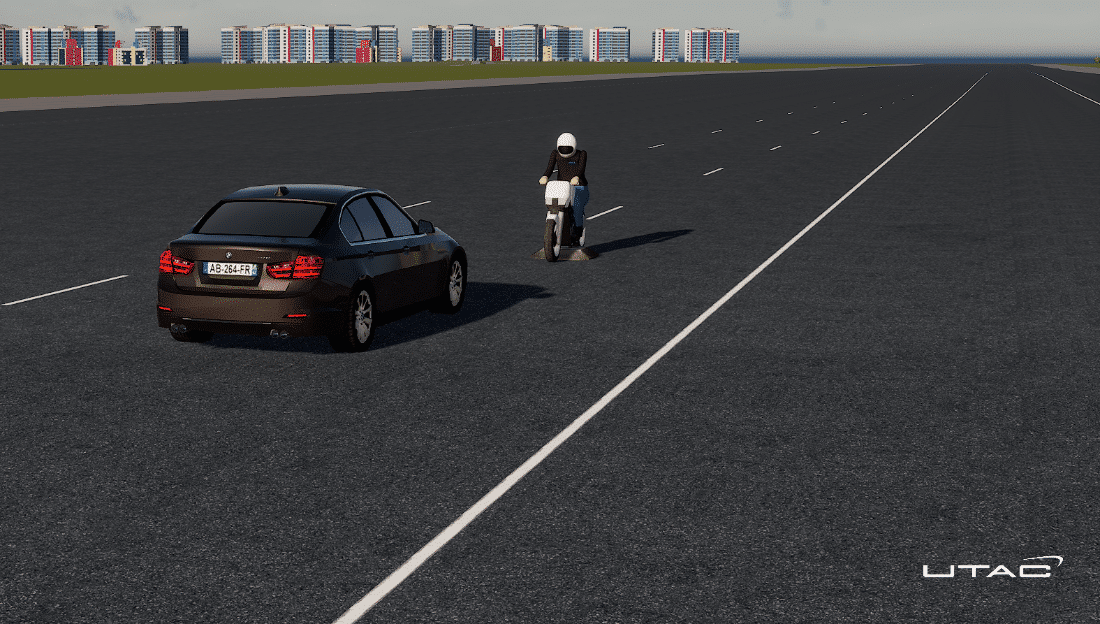
New Target
The main modification is the arrival of a new target motorcycle. The new scenarios with this new vehicle come from the MUSE project finished in 2019 and lead by UTAC. Three scenarios are added in the protocol for the motorcyclist security for AEB system and 2 more for LSS system:
- AEB
- Car-to-Motorcycle Rear Stationary (CMRs)
- Car-to-Motorcycle Rear Braking -0.4m/s² (CMRb)
- Car-to-Motorcycle Front Turn Across Path (CMFtap)
- LSS
- Oncoming Motorcycle
- Overtaking Motorcycle intentional
- Overtaking Motorcycle unintentional

New challenging scenarios with the global vehicle target
New scenarios never seen before are upcoming with GVT target, these scenarios are more critical if the tests are physically ran:
- Car-to-Car Crossing Straight Crossing Path (CCCscp)
- Car-to-Car Front Head-On Straight (CCFhos)
- Car-to-Car Front Head-On Lane change (CCFhol)

Light updates with pedestrian
Now, in the CPTA scenario, pedestrian is crossing from both roadsides. CPNCO and CPFA are played during the night:
- CPTA Farside, pedestrian nearside
- CPTA Farside, pedestrian farside
- CPTA Nearside, pedestrian nearside
- CPTA Nearside, pedestrian farside
- CPNCO NIGHT
- CPFA NIGHT

Compatibility with Massive Simulation
Henceforth, all our packs are now compatible with massive simulation solution: SCANeR explore & SCANeR compute.
The first update to achieve this compatibility is to transform the Driver UTAC into an FMU using the FMI standard. With this method there is no more compatibility issues for using it on a Linux environment.
Regarding UTAC Score, by using the new feature “results Data Base” it is now possible to import the data base generated by the simulation into it. After running a massive simulation, it is now possible to calculate the scoring by importing the “file.db”, provided by SCANeR, on UTAC Score from a workstation.
Pedestrians’ Targets
Pedestrians targets are now compatible with UXD Engine.

PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 11700K / i9 11900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3960X |
| RAM | 16 GB | 32/64 GB |
| Network | 1 Gbps | 1 Gbps |
|
HDD (supervisor PC) |
500 GB |
500 GB SSD (>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) |
Quadro P5000 GeForce GTX 1080 |
High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| OS | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |