The Scenario Importer tool generates a SCANeR scenario from real word data:
- Input are sensor recording: Mat file, csv or Ibeo© idc input files.
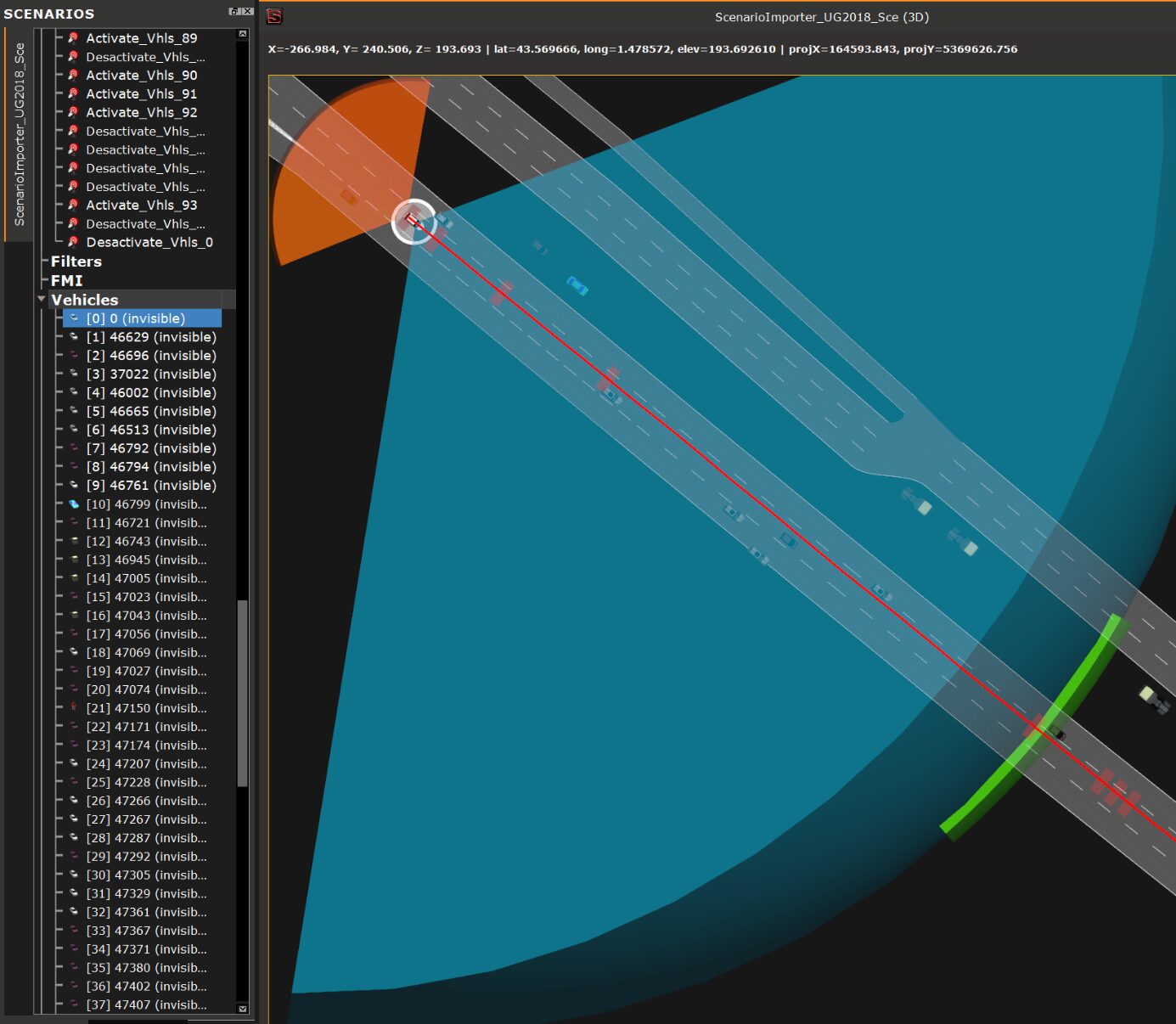
- The output is a scenario with a trajectory for each vehicle.
- Generated scenario is modifiable.
- Command line or GUI based import.
- Options to filter points or merge vehicles