Peux-tu te présenter rapidement ?
Après plusieurs années à mener des projets pour des constructeurs et équipementiers automobiles français, j’ai décidé de passer du statut d’utilisateur à celui de concepteur de simulateurs de conduite. A partir de 2009, j’ai supervisé des projets internationaux pour OKTAL (ancien nom d’AVSimulation). Lorsqu’AVSimulation a été créé en 2017, le besoin de simulateurs « sur étagère » était clair et j’ai évolué vers un nouveau poste de chef de produit. Mon travail consiste à définir la feuille de route des produits de simulation et à rester aussi proche que possible de nos utilisateurs et clients.

Christian Schost
Peux-tu expliquer en quelques mots ce qu’est un système de mouvement et ce qu’il apporte à un simulateur de conduite ?
Il existe une demande croissante de simulateurs de conduite capables d’atteindre des niveaux de fidélité élevés, pour être conduits par des conducteurs candides ou experts.
L’activité de conduite d’un véhicule est une combinaison de tâches parallèles. Lorsque le conducteur agit sur les commandes (comme le volant ou les pédales), il reçoit des réactions de différents sens. Ces réactions peuvent être visuelles ou auditives, et des solutions courantes existent pour transmettre ces signaux au conducteur. Mais ce dernier attend également des signaux vestibulaires et kinesthésiques pour évaluer l’intensité du freinage ou la vitesse dans un virage.
Le corps humain attend des accélérations et des vitesses de rotation pour ce haut niveau d’immersion. Le système de mouvement est constitué d’une ou plusieurs solutions d’actionnement contrôlées par le logiciel de simulation, et qui déplaceront le conducteur pour lui fournir ces signaux.
Ces retours d’information sont essentiels car le conducteur est impliqué dans des boucles d’ « asservissement » entre les actions sur le véhicule et ses réactions.
Mais tous les simulateurs ne nécessitent pas les systèmes de rendu les plus avancés et les plus complexes. Par exemple, AVSimulation fournit également des simulateurs statiques. Ils sont moins complexes, mais nécessitent une adaptation du conducteur qui cherchera le retour d’information dans d’autres canaux, principalement dans la vision.
La qualité du rendu de ces informations doit être adaptée aux cas d’utilisation du simulateur et au niveau de réalisme attendu du comportement du conducteur. La valeur des actions observées du conducteur dépend de l’exactitude des retours d’information. Comme partout, la conception d’un simulateur vise à trouver un juste équilibre, la meilleure adéquation et un compromis entre le coût et les cas d’utilisation.
Lorsque le centre d’intérêt d’une expérience implique fortement le modèle dynamique du véhicule, ou même la façon dont le conducteur positionne le véhicule sur les voies de la route au sein du trafic, il devient alors critique de fournir des retours kinesthésiques rapides et précis. De plus, un manque d’homogénéité dans la qualité des indices peut induire un malaise chez les conducteurs non experts.
Un système de mouvement a deux fonctions principales : fournir un niveau cohérent de signaux aux utilisateurs, et fournir au conducteur une qualité d’entrée suffisante pour le niveau de réalisme attendu.
Nous pouvons considérer qu’il existe plusieurs échelles de systèmes de mouvement sur les simulateurs de conduite :
- Ceux fournissant le niveau minimum de restitution pour des actions réalistes sur les commandes et le confort (généralement des systèmes à 3 DoF),
- Réalisme élevé : ces systèmes de mouvement visent à fournir des accélérations et des rotations à l’échelle 1 aux utilisateurs. Par conséquent, ils atteindront des vitesses plus élevées et auront des enveloppes de mouvement plus larges,
- Parfois, l’objectif n’est pas d’obtenir un niveau de rendu homogène sur toutes les dimensions, mais de se concentrer sur quelques degrés de liberté et le plus haut niveau de précision. Les applications telles que la dynamique élevée et le NVH nécessitent une puissance plus élevée dans les dispositifs d’actionnement pour essayer de fournir la latence minimale réalisable, mais elles offrent des durées plus courtes des accélérations (donc des excursions plus courtes).
Le nombre de DoF est fréquemment mentionné lorsqu’on parle de systèmes de mouvement. Qu’est-ce que c’est exactement ?
Dans notre monde 3D, il n’y a que 6 mouvements possibles : les translations sur les trois axes et les rotations autour de ces mêmes axes. Une voiture qui évolue sur une route utilise tous ces degrés de liberté.
Les simulateurs de conduite sont généralement conçus pour un niveau de restitution homogène, alors les systèmes les plus polyvalents disposent des mêmes 6 degrés de liberté. Mais les simulateurs plus compacts peuvent être contraints par l’espace disponible ou par le coût d’achat et se focaliseront sur les DoF les plus critiques.
Les simulateurs compacts comme SimEASY+ se concentrent sur le tangage, le roulis et l’élévation (3 DoF). Ils ne sont pas capables de rendre les accélérations longitudinales ou latérales, mais ils sont rapides et informent le conducteur dès le début des réactions du corps du véhicule.

SimEASY+
Les plateformes Stewart standard sont capables de rendre les 6 degrés de liberté. Elles peuvent avoir de longs actionneurs, ce qui permet d’utiliser l’algorithme de coordination de l’inclinaison pour utiliser la gravité et simuler des accélérations de longue durée. Ces systèmes existent en tant que produits du commerce, et ont une limite : les six mêmes actionneurs sont tous utilisés pour rendre tous les mouvements. Cela signifie qu’il n’est pas possible d’obtenir les mêmes performances maximales sur deux ou plusieurs axes en même temps. Les simulateurs de conduite utilisent bien sûr la rotation autour de l’axe vertical (lacet) lorsque le conducteur suit une route incurvée. La rotation en lacet peut utiliser toute la course des actionneurs pour conserver un facteur réaliste, mais dans ce cas, le système de mouvement a moins ou pas de course disponible pour rendre la translation ou d’autres rotations.
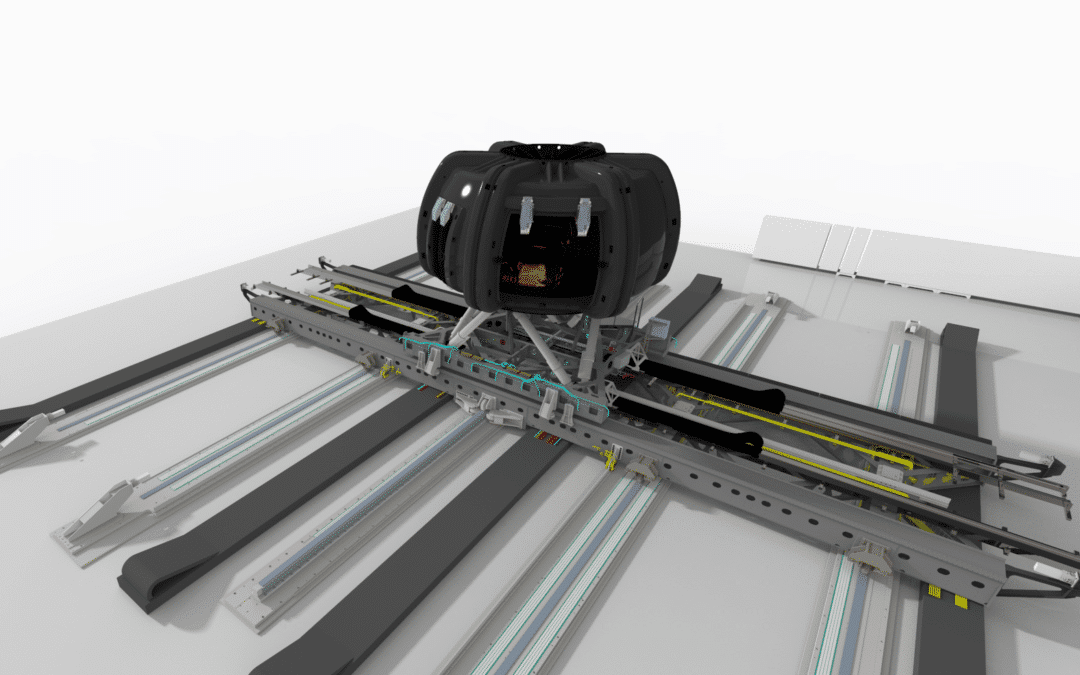
C’est pourquoi certains simulateurs sont équipés de systèmes de mouvement parallèles. Par exemple, les simulateurs SimELITE ont plus de degrés de liberté (9), car ils disposent de systèmes de mouvement sous et au-dessus de la plate-forme Stewart. L’avantage de tels systèmes est que les systèmes de mouvement multi-axes peuvent se concentrer sur moins d’axes et optimiser leur course utilisable sur ceux-ci. Un autre avantage des systèmes parallèles est qu’ils peuvent couvrir les mêmes axes avec des performances différentes : une grande plate-forme X-Y peut déplacer l’ensemble du simulateur, et un système de vibration peut être ajouté près du conducteur pour couvrir une plus grande gamme de fréquences.

Le nombre de DoF est donc un bon indicateur des capacités d’un système de mouvement, mais quels sont les autres aspects à prendre en compte ?
Les systèmes de mouvement peuvent rendre des signaux sur un maximum de 6 degrés de liberté, et ont leurs propres capacités. Le nombre de DoF actionnés est une indication des possibilités, mais il est crucial de comprendre qu’il existe d’autres facteurs pour assurer la meilleure adéquation entre le système de mouvement et les cas d’utilisation prévus du simulateur :
- Les valeurs maximales des accélérations. Si elles sont trop faibles, il sera difficile de restituer et de différencier les manœuvres standard et inhabituelles,
- La durée de ces mêmes accélérations, qui est limitée par la vitesse maximale du simulateur et les excursions possibles des systèmes de mise en mouvement,
- La latence effective,
- La fluidité,
- Le niveau de bruit,
- La gamme de fréquences qui peuvent être rendues …
Tous ces éléments (et d’autres) entrent dans une grande équation pour définir la meilleure architecture du système de mouvement.
L’aspect principal est de s’assurer que la conception du simulateur répond aux exigences pour un niveau de fidélité connu et pour des cas d’utilisation identifiés.
J’ai entendu parler du motion cueing. Pouvez-vous m’expliquer en quelques mots ce que c’est ?
Le modèle dynamique de SCANeR calcule la réaction du véhicule simulé sur le sol à 1000 Hz (ou plus). Il fournit les valeurs exactes de la dynamique du véhicule simulé.
D’un autre côté, un simulateur de conduite avancé peut utiliser plusieurs systèmes de mouvement ou d’actionnement en parallèle. Et chaque système de mouvement est généralement capable de fournir des signaux sur plusieurs axes, et possède ses propres performances et limites physiques.
L’algorithme de cueing est une combinaison de filtres et de fonctions de transfert qui transforme les sorties du modèle dynamique en ordres pour les différents systèmes de mouvement du même simulateur. Il divise les entrées en termes de fréquences, et intègre la technique de coordination de l’inclinaison. Cet algorithme est fondamental, il garantit que le simulateur tire pleinement parti des capacités de ses propres systèmes mécaniques.
Si cette interview vous a plu et que vous souhaitez en savoir davantage sur système de mouvement, vous pouvez lire cet article.