The Interview: SCANeR’s CALLAS vehicle dynamics model
May 13, 2022
Can you introduce yourself?
Rémi Figueredo, for the last 3 years, I have been a Research and Development engineer at AVSimulation, and my area of expertise is Vehicle Dynamics. As part of the technical direction, I participate in the development of the SCANeR software and its integration in the different simulators and/or VIL and HIL benches. I also intervene in vehicle dynamics studies for the customer, either in services or in assistance/support.
Can you explain what vehicle dynamics is?
Vehicle dynamics is an industrial and scientific field that describes how a vehicle reacts to the driver’s commands and the environment. The vehicle reactions include the movement of the chassis, and are influenced by the tire forces that exert effort on the suspension that act on the chassis through complex kinematics.
It is a mathematical model, based on the concepts and theories of general mechanics, implemented in software that simulates the vehicle movement. The model includes components for all aspects of a vehicle that influence its behavior: transmission, braking, suspension, steering, mass distribution, aerodynamics and tires.
It is a technical tool for an engineer that enables them to determine, at the preliminary design stage, the architecture of the vehicle and/or to validate the vehicle’s systems/subsystems (correlated calculation). It can be used as a substitute for a real chassis and powertrain when simulating the complex interactions of a modern, ADAS heavy, vehicle with sensors and actuators with its environment.
If I understand correctly, there are several types of modeling. What characterizes CALLAS and what are the benefits for users?
Indeed, we must first define the modeling levels describing the CALLAS model complexity.
General modeling: the type (wheeled vehicle, tracked vehicle or mix of both), the number of axles, the general geometry which is symmetrical or not, the mechanical transmission, hydrostatic transmission or without transmission (trailer), the thermal engine, electric motor or hybrid.
Modeling by component and/or subsystem: laws of steering/suspension/etc. which are symmetrical or not. Each component modeling can be simplified or detailed.
Modeling with other options of numerical aspects: Simplified or advanced volumetric reading ground.
It is said that CALLAS is a parametric model, i.e., the input settings are functional characteristics (curves and/or maps of the variation laws of the subsystems). Example: the functional characteristic curves of suspension elements (forces and kinematic variation versus wheel travel) are from either real vehicle measurements, or from kinematic calculations using multi-body modelling/conception with a high degree of complexity (MSC Adams, Modelica or Catia).
Thus, CALLAS enables the analysis of the vehicles dynamic behavior by choosing judiciously the model complexity in relation to the tests studied. This complexity is quantified by the number of degrees of freedom (DoF), which starts from 16-17 DoF for a conventional vehicle to more than 100 for a detailed trailer truck.
What does CALLAS bring to the Vehicle Dynamics package?
Reminder: The Vehicle Dynamics Pack enables the user to create and validate a complete dynamic vehicle model. Included in this Pack, the CALLAS model adjusts to the input settings provided by the user (modeling level choice in general and/or by component). Thus, CALLAS always provides a solution for creation and analysis. Also, the Pack provides a library of high-quality CALLAS vehicles with SCANeR. These vehicles are ready to use, and the user cans use and/or test them in a simulator, or as a working base for a dynamic study specific to their needs.
What are the existing CALLAS vehicle dynamics models?
SCANeR is provided as standard with a library of more than 20 CALLAS vehicles of different categories/sizes: such as cars (city, sedan, family in traction and/or propulsion), pick-ups, 4×4, 2 electric vehicles and also one hybrid, trucks (with more than 2 axles and twin wheels), a bus, trailers and 2 sports cars.
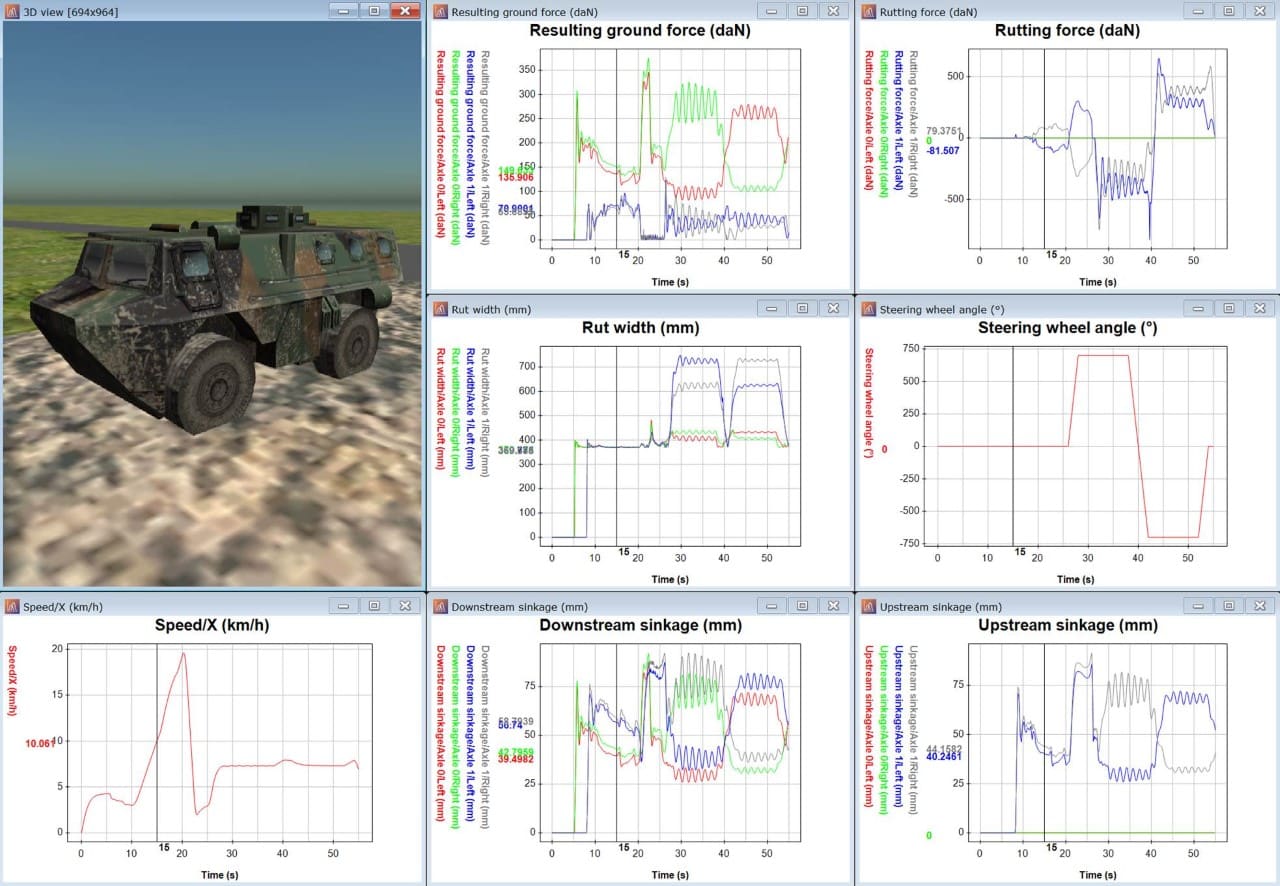
Additionally, there is access to special vehicles such as tracked or wheeled vehicles equipped with a turret subject to licensing. To match the vehicle with the customer’s application, a GUI editor enables changing the characteristics and attributes of the vehicle. This can also be provided as a service.
What are the points that make CALLAS one of the best vehicle dynamics in the world?
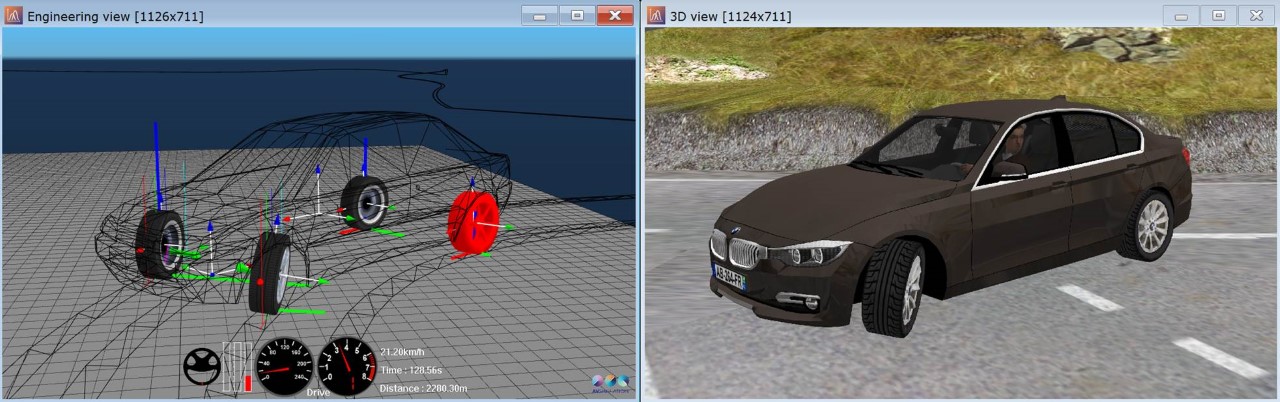
CALLAS adapts to users’ needs. Most users can use the provided CALLAS reference models for their simulations, with little to no modifications. However, an expert engineer can create a vehicle from a blank sheet of paper and enter all the actual measurements and/or detailed characteristics of the various cross-functional vehicle dynamics trades (actual tests/measurements, 3D kinematic calculations/designs from multibody software) for a highly accurate and validated vehicle behavior.
CALLAS is a fast and open system. It can run from 2000Hz to 8000Hz on standard PC hardware with similar or higher complexity than competing models (with 17 DDL or more). It can be used and supported for driving simulator applications, real-time HIL/SIL/VIL platforms and test beds, as well as for faster-than-real-time cloud computing. Customers can integrate their own subsystems into CALLAS using the tools of their choice: Simulink, FMI, C/C++, etc.
Can you give us an example of a recent project where CALLAS was used?
CALLAS is used on some of the largest motion simulators in the world, such as KEX, for R&D on sports vehicles at Alpine automotive, in military applications for both R&D and training. CALLAS can also be used for studies as a service by AVS:
Study on the validation of truck configurations with semi-trailers (optimal positioning of onboard loads), based on compliance and safety criteria
Model a vehicle based on acquisition data made on a real vehicle on a test track
Do you have any examples of the level of correlation between what was simulated with CALLAS and what was physically measured?
Correlation of the vehicle is dependent on the amount of data available on the vehicle. This data can be measured on a test bench or on a test track. On a fully validated model, the behavior can be used as a substitute for the real vehicle.
Back to the two studies discussed:
In concrete terms, a CALLAS model representing the truck trailer was created. All characteristics and measurements provided by the customer had been taken into account. Real test feedback (maximum angle measurement from a tilt table test) was used as reference. Thus, we refined the model to obtain the same results on a tilt table test simulation. This additional study enables us to be more objective about the results expected from the other driving simulations.
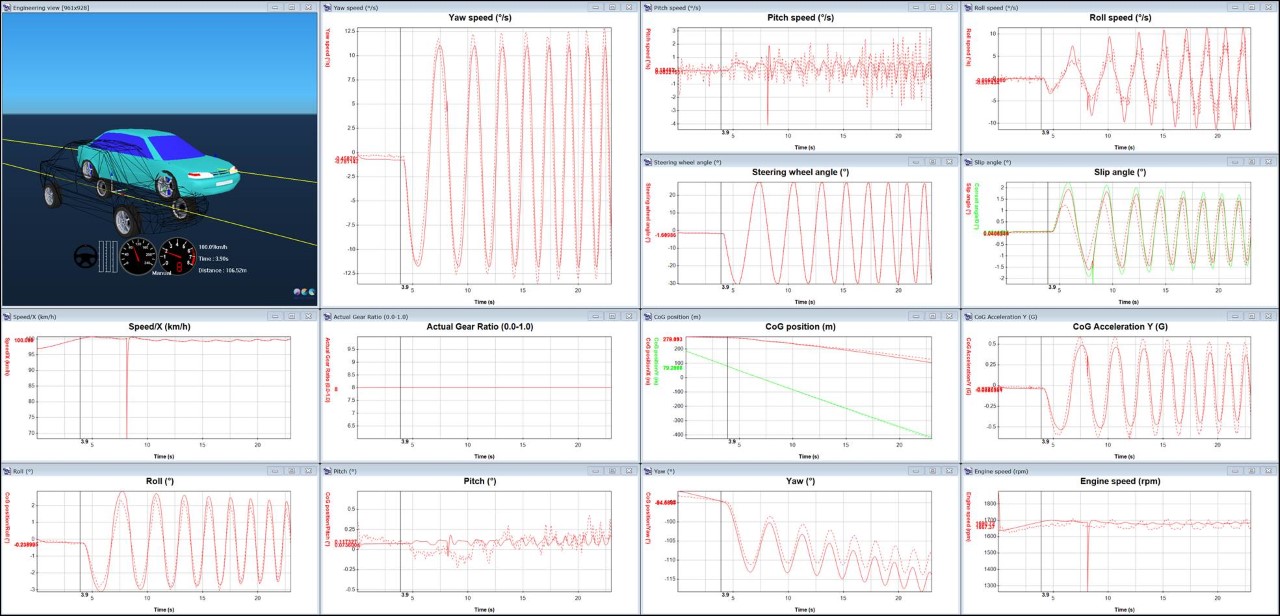
This was precisely an overall calibrating of a CALLAS model from many and varied real tests (established corner, sine-steering wheel, avoidances). We had a good matching (< 10%) on almost objectives (trajectory, engine speed, roll, drift angle, lateral acceleration), and on others less good (< 25%) which required going to more realistic levels of sub-models.
Do you have anything to add in conclusion?
CALLAS is light and fast yet detailed and valid. It is delivered ready to be used in a wide variety of applications and can be used for simulators, HIL validation, vehicle dynamics R&D, and cloud computing. There is no proprietary lock-in; SCANeR is an open platform and supports CALLAS and competing vehicle dynamics packages on the same level.