Peux-tu te présenter en quelques mots ?

Marcus HEWAT, je suis Ingénieur Tech Lead chez AVSimulation dans le domaine Véhicule Dynamique, Motion et Système temps réel. J’étais auparavant chez SERA-CD, une entreprise dans laquelle nous développions le modèle de dynamique véhicule CALLAS, qui a été racheté par SOGECLAIR. Cela fait donc 20 ans que je travaille dans ce domaine.
[Ndlr : SERA-CD est depuis devenu SERA Ingénierie, filiale SOGECLAIR et un partenaire de longue date, conçoit les structures métalliques de nos simulateurs]
Peux-tu expliquer le terme VIL.
Le VIL est l’acronyme de Vehicle in the Loop. L’idée est d’introduire un véhicule complet dans un environnement virtuel. C’est la principale différence avec d’autres cas de figure où seul un élément (logiciel) du véhicule, est introduit. Le véhicule test en VIL est complet et très proche de la série. Ceci permet de reproduire toutes les interactions qui ont lieu entre les composants mécaniques et électroniques du véhicule. De ce fait, on peut analyser précisément le comportement et les performances de tous les sous-systèmes tels qu’ils seront dans le véhicule en production.
Quels types de problèmes les tests VIL permettent-ils de résoudre ?
Tester un VIL veut dire que nous testons un système entièrement intégré dans un véhicule. Par rapport à d’autres tests qui sont purement logiciels, le VIL permet de se mettre vraiment en situation en rencontrant les problèmes liés à un système final.
Par exemple, les capteurs qui sont donc réels dans ce cas sont imparfaits, ils peuvent générer du bruit. Les imprécisions qui sont liées à la simplification des modèles mathématiques sont supprimées et les effets liés à l’interaction des systèmes entre eux sont reproduits.
Quelles sont les alternatives aux tests VIL ?
La première alternative aux tests VIL est de faire des tests grandeur nature avec potentiellement des véhicules et piétons leurres. Dans un second temps, il est possible de faire des tests en amont avec du HIL (Hardware in the Loop) ou du SIL (Software in the Loop).
HIL (Hardware In the Loop)
SIL (Software In the Loop)
Par rapport à un essai sur piste classique, quels sont les avantages ?
Par rapport à un essai piste classique, quand nous utilisons un véhicule ou piéton leurre, ce qu’il faut noter c’est qu’un leurre comme par exemple une voiture gonflable n’a pas forcément la même signature à un radar ou le même visuel qu’un vrai véhicule.
D’autre part, quand le système ne fonctionne pas ou lorsque nous sommes à la limite de ce dernier, nous pouvons tout de même rentrer en collision et abimer le véhicule. Le VIL permet donc d’éviter ce style d’incident. De plus, beaucoup de choses ne peuvent pas être testées sur des essais sur piste. En effet, nous ne pouvons pas faire rouler une voiture leurre à 130km/h par exemple alors qu’une voiture virtuelle peut tout à fait rouler à cette vitesse. Nous pouvons également faire des mises en situation dans des conditions de trafic dense.
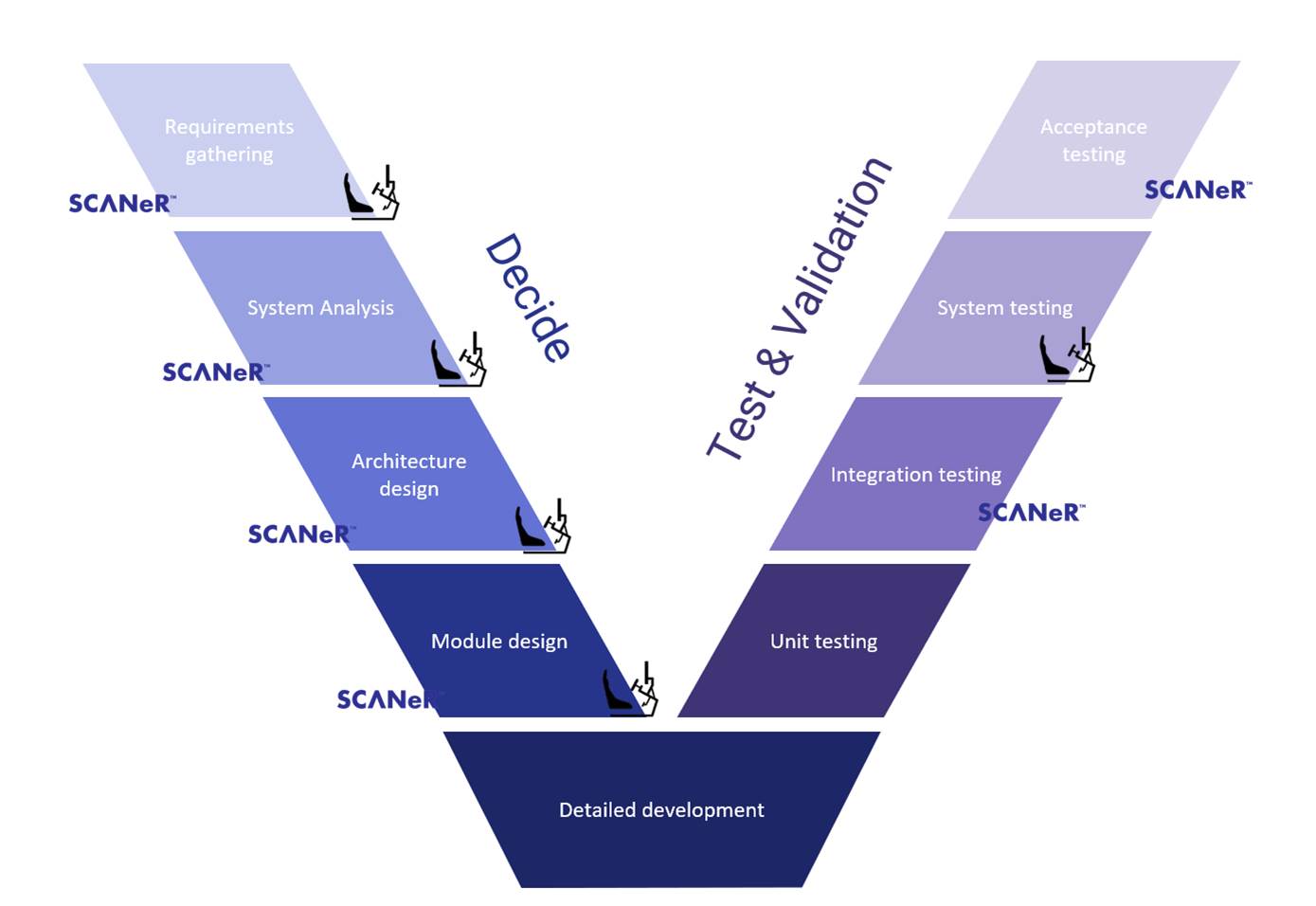
Quelle est sa place et son rôle dans le cycle en V ?
Le VIL arrive en fin de cycle. Concrètement, c’est l’étape d’avant ou de substitution des essais sur piste. C’est une étape importante car elle présume toute la conception et le développement des tests ont été faits ainsi que les tests matériels. Nous sommes donc sur un véhicule presque fini. Nous sommes donc sur la validation finale en situation et dans la voiture.
Qu’est ce qui fait de SCANeR un très bon outil pour le VIL ?
Le point fort de SCANeR est de pouvoir fournir un environnement virtuel, riche et représentatif de ce qu’il se passe dans la réalité. Cela inclus donc les réseaux routiers, les trafics environnants, les piétons et la scénarisation qui permet de déclencher des événements. Ceux-ci vont permettre d’apporter toute la puissance de ces outils dans un cas de figure où nous utilisons un véhicule réel, très proche de la production pour s’assurer que cela fonctionne comme prévu lors de la conception.
SCANeR étant utilisé dans les phases en amont de la conception, on peut aussi réutiliser des données, des scénarios et modèles issus des simulations.
VIL statique / VIL dynamique, quelle est la différence et les cas d’usage ?
En effet, il existe deux types de VIL ; statique et dynamique. Ils ont en commun l’utilisation d’une voiture complète et la mise au point d’ADAS. C’est-à-dire que nous pouvons tester les véhicules dans des situations qui seraient difficiles à reproduite et/ou dangereuses. Comme par exemple, simuler la détection d’un piéton ou d’une voiture qui ne sont pas dans l’environnement réel.
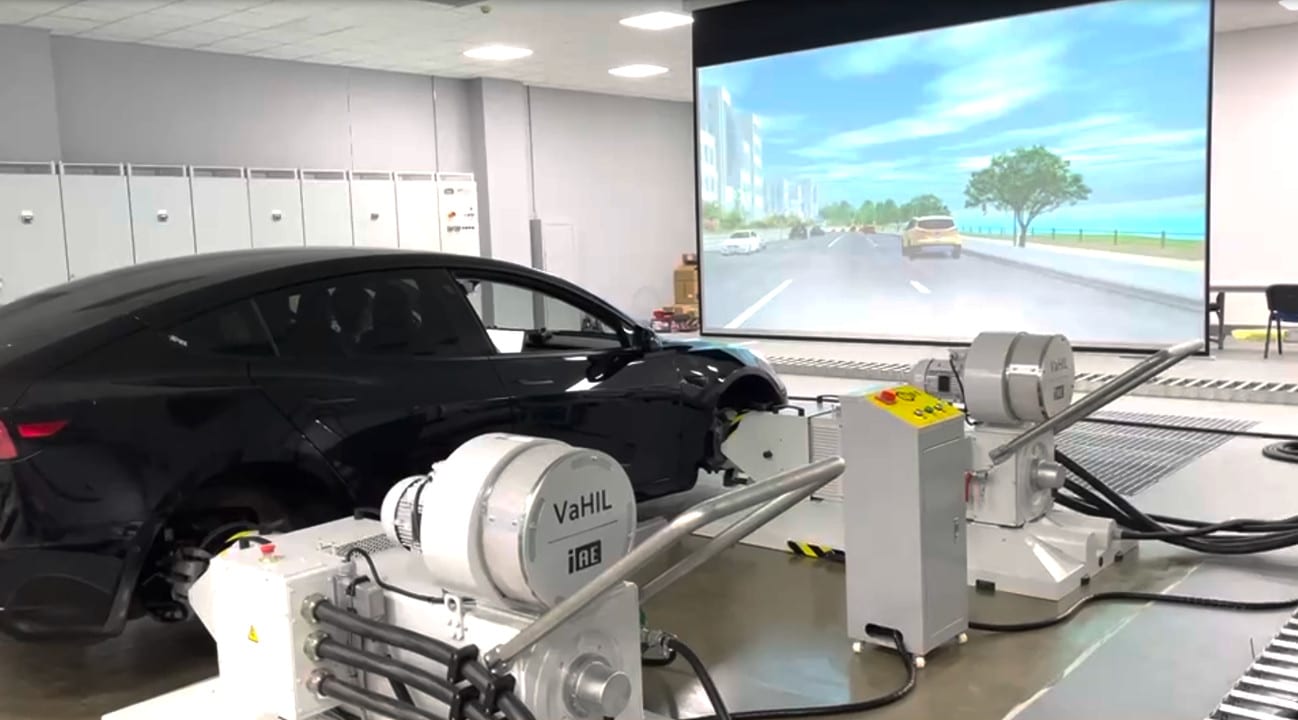
Le VIL statique représente une voiture posée sur un banc d’essai* afin de le faire rouler sans réellement qu’il se déplace sur la route. Ce VIL permet de tester la transmission, la pollution, la gestion de l’énergie et le passage de l’électrique à la thermique qui eux restent réels dans la simulation. Cependant, tout ce qui touche au comportement châssis restent simuler en logiciel et l’environnement est entièrement virtuel.
*Un banc VIL ressemble à un banc de puissance (qui permet de mesurer la puissance du véhicule) type Dynojet.
Cas d’usage :
Avec un VIL statique, comme la voiture est simplement sur un banc et livré potentiellement avec le logiciel, il est possible de faire des simulations synthétiques comme par exemple une accélération, un freinage, une performance, de la consommation sur de la durée, etc. Etant donné que les roues tournent à des vitesses indépendantes les unes des autres, il est aussi possible de faire des tests en virage.
Un autre cas d’usage pourrait être de réaliser des essais complexes comme des roulages en milieu urbain.
Sur un VIL dynamique, nous sommes en effet sur une piste d’essai donc c’est une forme d’essai sur piste finalement. La différence est que nous allons venir introduire des éléments virtuels comme par exemple rendre la piste plus complète en simulant des bâtiments, piéton, véhicules, etc. C’est donc de la réalité augmentée. Cette réalité augmentée peut être perçue à la fois par le conducteur du véhicule ainsi que les capteur (virtuels).

Un mot pour la fin ?
Lors de ma session « Presentation of products and achievements around VIL test benches » des SCANeR Days, une chose est ressortie.
Ce que nous pouvons mettre en avant est que SCANeR est une solution logiciel de simulation automobile qui est très flexible. Sur tout le cycle de développement, du prototypage très tôt jusqu’au VIL en passant par les étapes intermédiaires (HIL et éventuellement simulation massive sur le Cloud), SCANeR permet d’utiliser les mêmes interfaces, scenarios, données et modèles du début à la fin du développement sans devoir les créer à nouveau dans un outil différent à chaque étape. Cela permet de minimiser le travail de chacune des étapes.
Pour en savoir davantage, regardez la vidéo de présentation des bancs de test ViL des SCANeR Days 2021 sur notre chaîne YouTube.