
There are many challenges we face in the domain of automotive simulation. While it is of course important to recognize the clear and numerous benefits of simulation, it is also important to recognize the need to implement appropriate systems in a simulation environment. In other words, recognizing and adapting a simulation environment to its use-case is just as important as the making decision to use simulation itself.
We know there are many crucial elements to maximizing the realism and immersion of a simulator; screen size, resolution, type of display, size and shape of cockpit, components of the cockpit, the list goes on. All of these play a key role in immersion, but today I would like to focus on one of the most important elements of simulation, motion.
Motion in simulation can take many forms, as well as many different levels of fidelity, ranging from simple rotation on a yaw table to continuous exposure to g force emulated with large x-y rail systems.
First, let’s take a look at how the level of fidelity of motion in simulation is measured. Degrees of Freedom, commonly abbreviated as DoF, is a measure of the positional state of a system, which follows the predefined parameters listed below:
Roll – left and right tilt of the systems
Pitch – forward and backward tilt of the system
Yaw – the spin or rotation of the system
Heave – elevational movement of the system
Sway – left and right movement of the system
Surge – forward and backward movement of the system
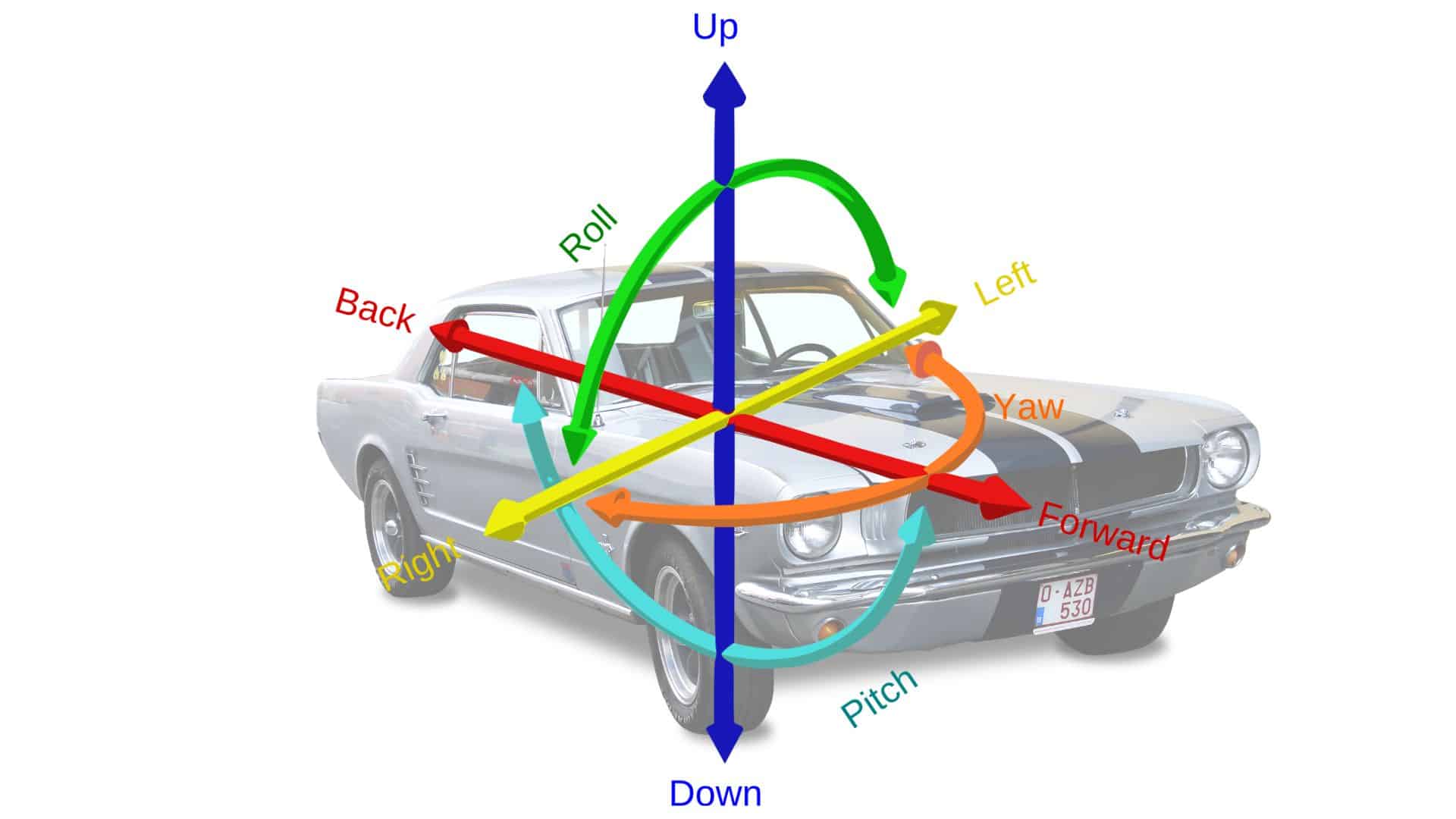
The primary degrees of freedom used in simulation.
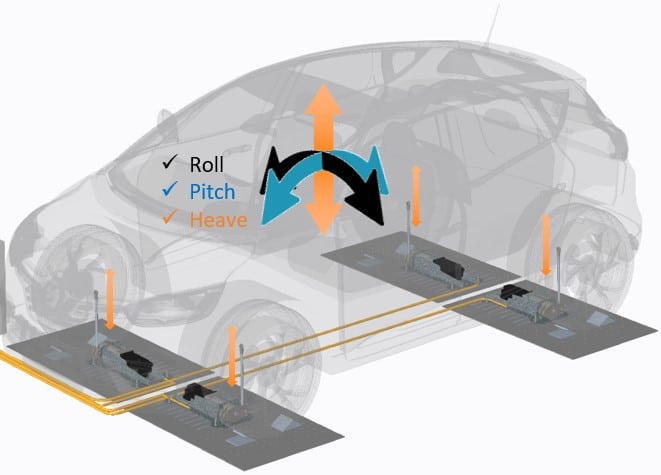
The actuators on each wheel of this cockpit provide motion for Roll, Pitch, and Heave

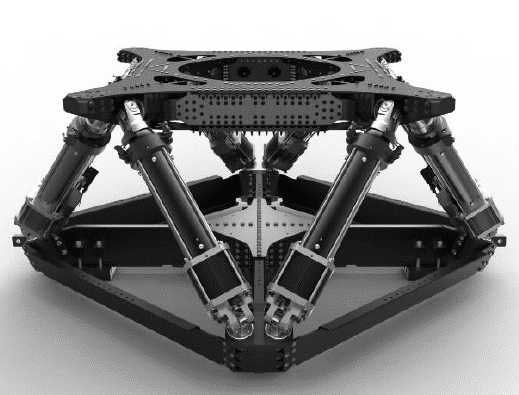
The “hexapod” as seen here, is a common configuration of actuators used to achieve a 6DoF system.
While 6DoF systems can of course be expected to be a bit pricier than their 3DoF counterparts, they add the very important sensations of turning, acceleration and deceleration. This is particularly important for immersion, especially when it comes to accelerating and stopping in a simulation.
Even more advanced, we also have the 7DoF systems. These are very similar to the 6DoF systems, but with the added exception of a rotating table, commonly referred to as a Yaw table. While 6DoF hexapod systems are able to provide a degree of yaw, a dedicated table allows for continues yaw. Additionally, a dedicated table means yaw can be emulated without taking the resources of the other actuators; they can continue to provide movement for other degrees of freedom while the yaw table focuses on rotation.

The yaw table, as seen here, is often placed under the actuators, allowing the rotation of the entire system.

AVSimulation’s SimELITE shown with full 9DoF systems.
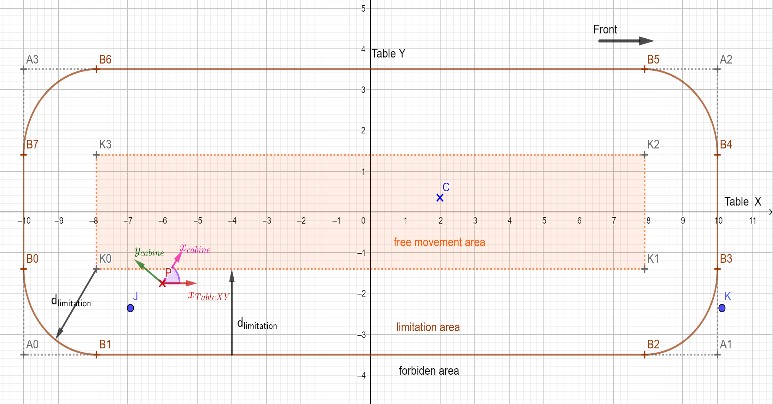
A diagram showing the limits of a motion system imposed by the cueing algorithm.
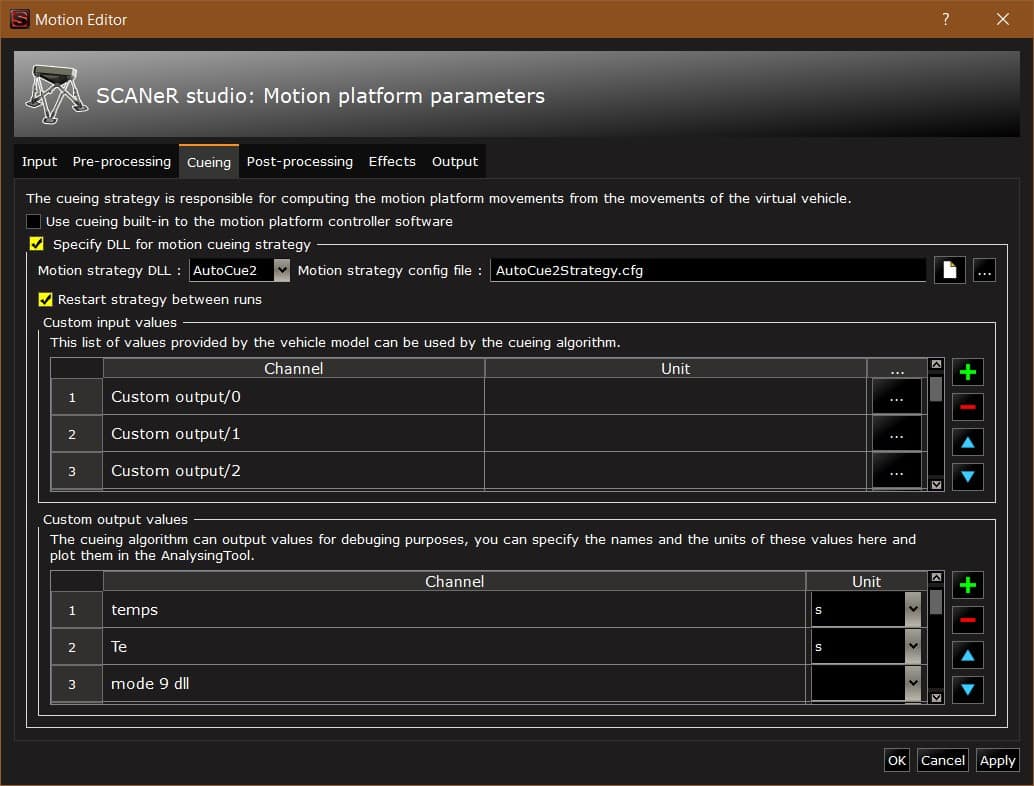
Motion cueing settings as seen in SCANeR Studio. Note the options for preset strategies as well as custom values.
| In order to achieve a high level of immersion, it is important to ensure that the motion sensations exerted on the driver match the visual sensations as closely as possible. This serves two primary purposes: avoiding simulator sickness, and generating a more realistic feeling of driving. To this end, high fidelity motion systems that achieve a high DoF work best. No matter what grade of motion system is used, proper motion cueing is something that can not be overlooked. With all of this in mind, you’ll definitely be able to enjoy immersive simulation. |
Written by Terry Vanbaalen.