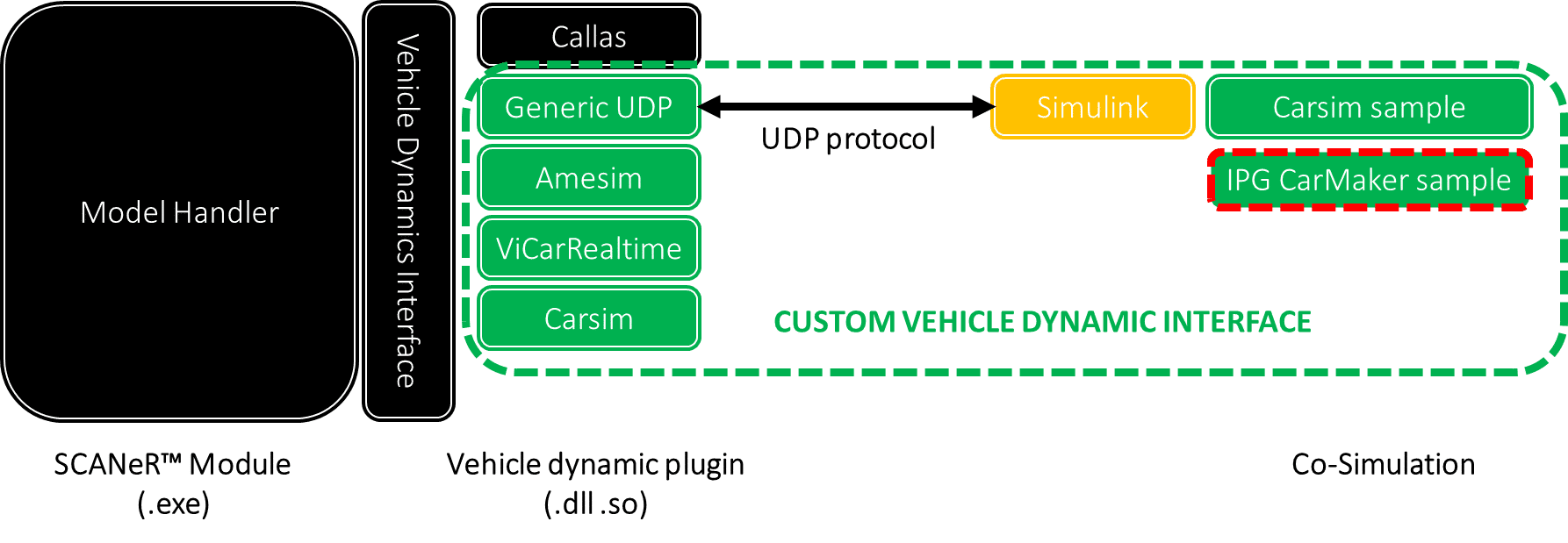
The Custom Vehicle Dynamics Interface feature allows users to interface any external vehicle dynamics models with SCANeR studio simulation engine (as CarRealTime, Carsim, AMESim, Custom, etc.).
To interface an external vehicle dynamics model using this feature users have 2 choices:
- Use SCANeR studio’ plugins.
- Or use the VehicleDynamics API (part of the Studio SDK).

| Key features | |
| Main features |
|
| SCANeR studio plugins |
|
| VehicleDynamics API |
|
| Included simulation modules |
|
| Samples |
Samples to show how to integrate external models:
|